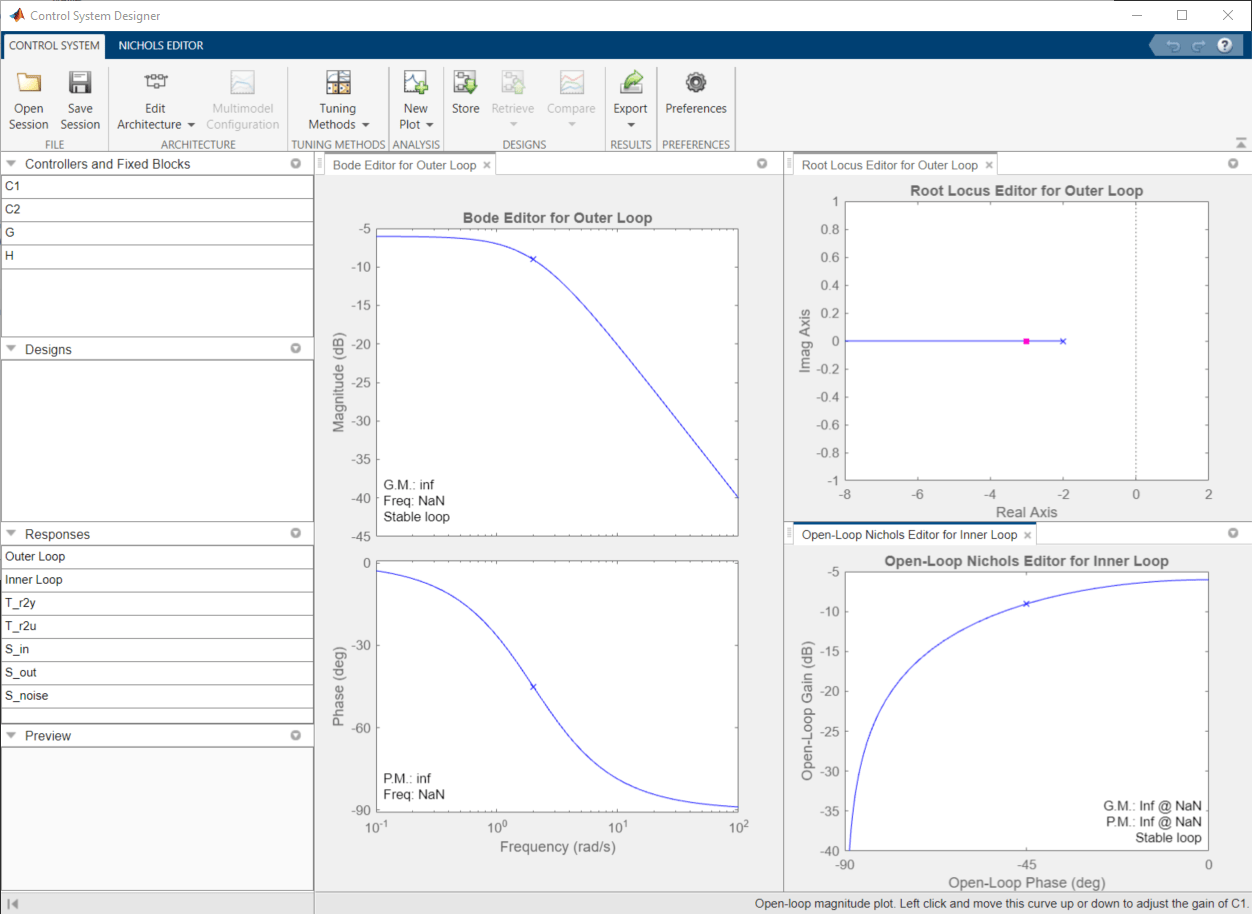
控制系统设计器
设计单输入单输出 (SISO) 控制器
说明
使用控制系统设计器,您可以为在 MATLAB® 或 Simulink® 中建模的反馈系统设计单输入单输出 (SISO) 控制器(需要 Simulink Control Design™ 软件)。
使用此 App,您可以:
使用以下方法设计控制器:
交互式波特图、根轨迹图和尼柯尔斯图等图形编辑器,用于添加、修改和删除控制器极点、零点和增益。
自动 PID、LQG 或 IMC 调节。
基于优化的调节(需要 Simulink Design Optimization™ 软件)。
自动回路成形(需要 Robust Control Toolbox™ 软件)。
调节单回路或多回路控制架构的补偿器。
使用时域和频域响应(如阶跃响应和零极点图)分析控制系统设计。
比较多个控制系统设计的响应图。
为多模型控制应用设计控制器。
打开 控制系统设计器 App
MATLAB 工具条:在 App 选项卡上的控制系统设计和分析下,点击 App 图标。
MATLAB 命令提示符:输入
controlSystemDesigner。Simulink 工具条:在 App 选项卡上的控制系统下,点击该 App 的图标。
示例
编程用途
controlSystemDesigner
controlSystemDesigner 打开控制系统设计器,使用以下默认控制架构:

该架构由 LTI 对象组成:
G - 被控对象模型
C - 补偿器
H - 传感器模型
F - 预滤波器
默认情况下,该 App 将其中每个模型都配置为一个单位增益。
controlSystemDesigner(plant,comp)
plant,comp)controlSystemDesigner( 将补偿器 C 初始化为 SISO·LTI 模型 plant,comp)comp。
controlSystemDesigner(plant,comp,sensor)
plant,comp,sensor)controlSystemDesigner( 将传感器模型 H 初始化为 plant,comp,sensor)sensor。sensor 可以是任何 SISO LTI 模型,也可以是这些模型的数组。如果将 plant 和 sensor 都指定为 LTI 模型数组,则这些数组的长度必须匹配。
controlSystemDesigner(plant,comp,sensor,prefilt)
plant,comp,sensor,prefilt)controlSystemDesigner( 将预滤波器模型 F 初始化为 SISO·LTI 模型 plant,comp,sensor,prefilt)prefilt。
controlSystemDesigner(views)
views)controlSystemDesigner( 打开 App 并指定初始图形编辑器配置。views)views 可以是以下任何字符向量,也可以是一个包含多个字符向量的元胞数组。
'rlocus'- 根轨迹编辑器'bode'- 开环波特编辑器'nichols'- 开环尼柯尔斯编辑器'filter'- 波特编辑器,用于从预滤波器输入到被控对象输出的闭环响应
除了打开指定的图形编辑器,App 还可绘制闭环输入-输出阶跃响应。
controlSystemDesigner(views,plant,comp,sensor,prefilt)
views,plant,comp,sensor,prefilt)controlSystemDesigner( 指定初始绘图配置,并使用指定的模型初始化被控对象、补偿器、传感器和预滤波器。如果省略模型,App 将使用默认值。views,plant,comp,sensor,prefilt)
controlSystemDesigner(initData)
initData)controlSystemDesigner( 打开 App,并使用初始化数据结构体 initData)initdata 初始化系统配置。要创建 initdata,请使用 sisoinit。
controlSystemDesigner(sessionFile)
sessionFile)controlSystemDesigner( 打开 App 并加载之前保存的会话。sessionFile)sessionFile 是 MATLAB 路径中的会话数据文件的名称。这些数据包括当前系统架构和绘图配置,以及保存在数据浏览器中的任何设计和响应。
要保存会话,请在控制系统设计器中的控制系统选项卡上,点击 ![]() 保存会话。
保存会话。
版本历史记录
在 R2015a 中推出You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)