MATLAB EXPO ハンズオン:体験!3D走行環境まで含めたモデルベースデザインとシミュレーション
概要
この体験型セッションでは、EVの電費計算からADAS・自動運転開発まで活用可能なMathWorksの3Dシミュレーション環境をハンズオン形式で体験いただきます。
開発コストとリスクの増加に伴い、モデルベース開発とシミュレーション技術の進化も求められています。従来のプラントや制御モデルに加え、「走行環境」や「センサ」のモデル化も必要不可欠です。各セッションでは必要な3D走行環境をマウス操作で手早く設計し、Simulinkによる統合検証までの様子をご覧いただけます。
セッションは2つに分かれていますが、どちらか一方のみのご参加も大歓迎です。
※参加者の方には後日、ハンズオンに必要なMATLAB、Simulink製品とRoadRunner製品の評価ライセンスとインストール方法をご案内いたします。直前の申し込みには対応できない場合もございますので早めのご登録をお願いいたします。
※オンライン(Webex)で実施します。
※MATLAB, Simulinkついての深い知識は不要ですが、初めての方は、事前に無償オンラインコースMATLAB入門、Simulink入門を履修されると理解が深まります。(https://matlabacademy.mathworks.com/jp/)
ハイライト
- RoadRunner製品による3D走行環境のモデル化を体験
- 3D走行環境を組み込みこんだSimulinkシミュレーションを体験
参加対象者
- ADAS・自動運転開発に携わるエンジニア
- 3Dシミュレーション環境構築に興味のある方
- OpenDRIVE/OpenSCENARIOフォーマットの活用を考えられている方
- 既に別のシミュレータを使っているがさらなる効率化に課題を感じている方
- Simulinkのプラントモデルに走行環境まで含めたシミュレーションを実施したい方
講演者について
町田 和也(まちだ かずや) MathWorks Japan シニアアプリケーションエンジニア
2009年から複数半導体メーカにて電源ICや半導体メモリの開発に従事。2017年にMathWorks Japanにアプリケーションエンジニアとして入社し、画像処理、信号処理、ディープラーニング、自動運転に関係する技術領域をサポートしている。
福地 伸晃(ふくち のぶあき) MathWorks Japan シニアアプリケーションエンジニア
画像処理、点群処理を活用したばら積みピッキングロボットの研究を専門に学位取得後、自動車完成車メーカにて先進安全システムの開発に従事。2021年にMathWorks Japanに入社。画像処理、点群処理、自動運転、自律ロボットに関係する技術領域を担当。
アジェンダ
| 時間 | タイトル |
| 14:00~14:10 | はじめに |
14:10~15:20
|
体験セッション1:RoadRunner製品による3D走行環境のモデル化 このセッションではRoadRunner/RoadRunner ScenarioによるADAS・自動運転シミュレーションに必要な走行環境とテストシナリオ設計を体験いただけます。 マウス操作で手早く道路と車両挙動を定義し、作成したシナリオをSimulinkによるシミュレーションで活用いただけます。またOpenDRIVE/OpenSCENARIO形式でエクスポートし、外部のシミュレータで再利用も可能です。事前知識は不要です。ご興味のある方是非ご参加ください。 |
| 15:20~15:30 | Q&A(休憩) |
15:30~16:50
|
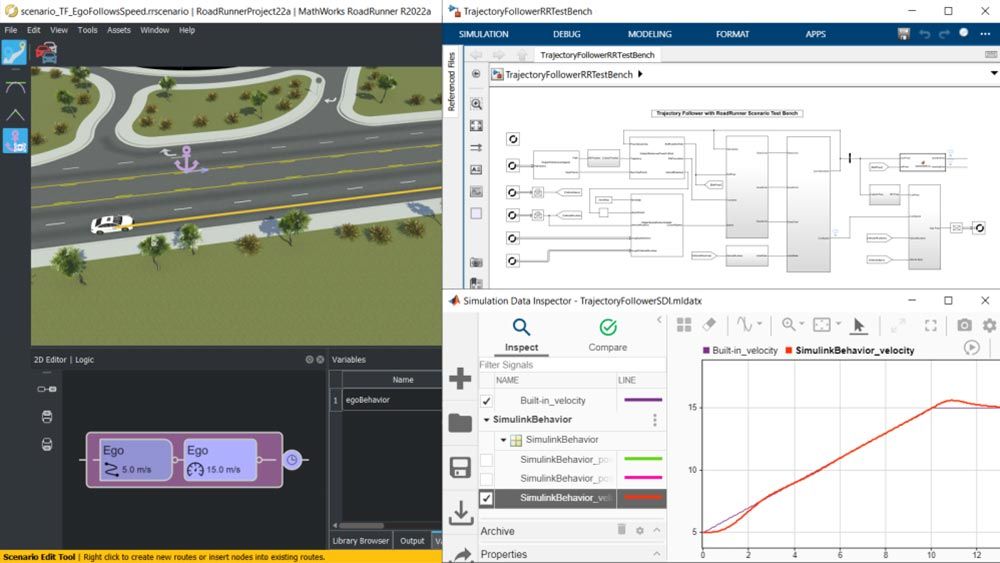
体験セッション2:3D走行環境を組み込みこんだSimulinkシミュレーション このセッションではRoadRunner/RoadRunner ScenarioとSimulinkの連携例について実際にご体験いただけます。システムが複雑化していく中でエンジン、モータなどの単体性能だけでなく、システム全体の性能を開発時に見積もり、すばやいサイクルで改善することが重要です。EV車両の電費計算やADASシステムなどの実例を踏まえ、走行環境を活用したモデルベース開発とシミュレーションをご紹介します。是非お手元の環境でもトライしてみましょう! |
| 16:50~17:00 | Q&A |
対象製品
このイベントは、関連するトピックシリーズの一部です。 このシリーズのイベントリストをご覧ください。