借助三维手术仿真设计新医疗设备
办公室机器人手术的虚拟验证
像手上形成的老茧一样,过度用嗓会导致声带上出现坚硬的非癌性增生。对于依赖嗓音的演员和歌手来说,及时切除这些结节以保护声带功能至关重要。切除良性结节以及一些罕见癌性肿瘤的传统方法是在医院手术室进行手术。
近年来,在医生办公室用激光切除这种病变的做法日益普及。该过程需要用激光脉冲照射来破坏或缩小声带生长物。它可以是一种不需要全身麻醉的快速门诊手术。
然而,目前的手术用内窥镜设备技术具有局限性。“激光照射方法的确有效。这是个好消息,”伍斯特理工学院 (WPI) 的机器人工程教授 Loris Fichera 说道。“坏消息是,由于这些仪器在引导光线方面很受限制,所以想到达喉部的某些部位可能会有挑战性。”
新的光纤设计和内窥镜配置应该能够克服这一限制。Fichera 和他的同事已使用 MATLAB® 通过仿真演示了具有倾斜尖端的光纤(而不是目前使用的扁平光纤)在人类喉部的高清三维模型能够取得最好的效果。通过医疗设备仿真,他们希望减少制造物理原型所需的时间和成本。这些原型必须首先在尸体上进行测试,然后在临床上进行测试。仿真可以在将来更高效的光纤和内窥镜设备开发过程中提供验证。
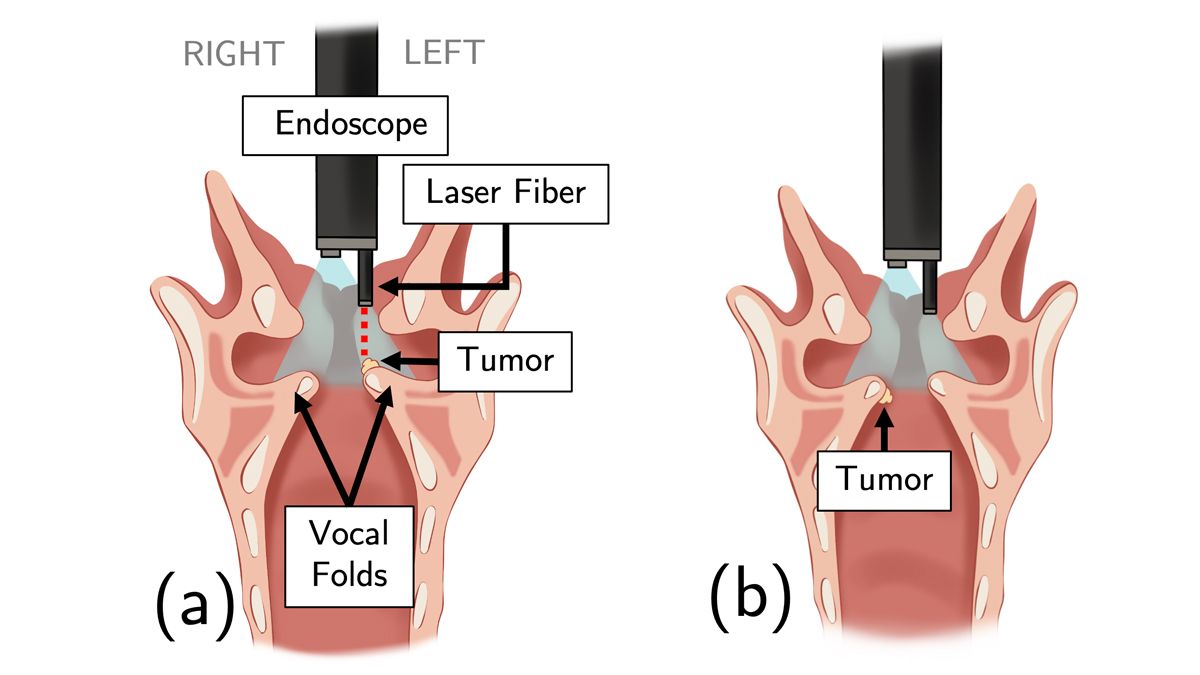
a) 蓝色锥体表示内窥镜相机的视图,其中包括肿瘤视图。红色虚线表示激光光纤视线。b) 前视激光光纤难以到达位于声带下方的肿瘤。(图片所有权:Carla Dipasquale 图解,经 Loris Fichera 许可)
“这些设备的制造需要花费大量金钱和时间,”Fichera 说道。“使用 MATLAB 进行仿真,我们可以快速评估几十种不同设计,而无需实际制造它们。我们通过仿真确定哪个配置有希望获得成功并对其原型化。这可以缩短原型构建时间,更具成本效益。现在,每个设计和原型构建周期只需三周到两个月的时间,具体取决于设计的复杂程度。”
虚拟喉部
基于临床的喉部手术需要将具有相机和光纤的薄而柔软的内窥镜送入喉部。目前使用的光纤有扁平末端,向前朝目标组织发射光线,因此它们无法到达不在直接视线内的声带下表面或边缘。
“使用 Medical Imaging Toolbox,我们只需点击几下鼠标即可加载整个数据集并创建三维渲染。此功能和导出数据功能非常重要:这意味着我们无需从头开始每个新设计。我们可以依靠已知的有效标准方法。这就能为每个新设计节省数周时间。”
最近的研究表明,从不同角度引导光线的锥形光纤尖端可以让医生治疗难以到达的喉部空间。Fichera 与哈佛医学院和波士顿布莱根妇女医院的医学专业人士合作,评估这种倾斜光纤的有效性。他们进行了一项基于仿真的研究,比较不同类型的激光光纤:传统的前视光纤和三面发射光纤,分别以 45°、70° 和 90° 的角度发射激光。
WPI 团队通过收集喉部标本的微计算断层扫描 (microCT) 图像并使用 Image Processing Toolbox™ 进行处理,创建了七种不同的人类喉部三维解剖模型。
CT 扫描是一系列高分辨率灰度二维图像,其中每个像素都传达某个位置的组织密度。每个图像表示一个组织切片,该切片与下一个图像中的切片相距几微米。“这就像在不同高度拍摄照片一样,”Fichera 说道。“我们处理这些图像以重新构造三维形状,其输出是立体光刻 (STL) 文件,与 3D 打印通常使用的格式相同。”
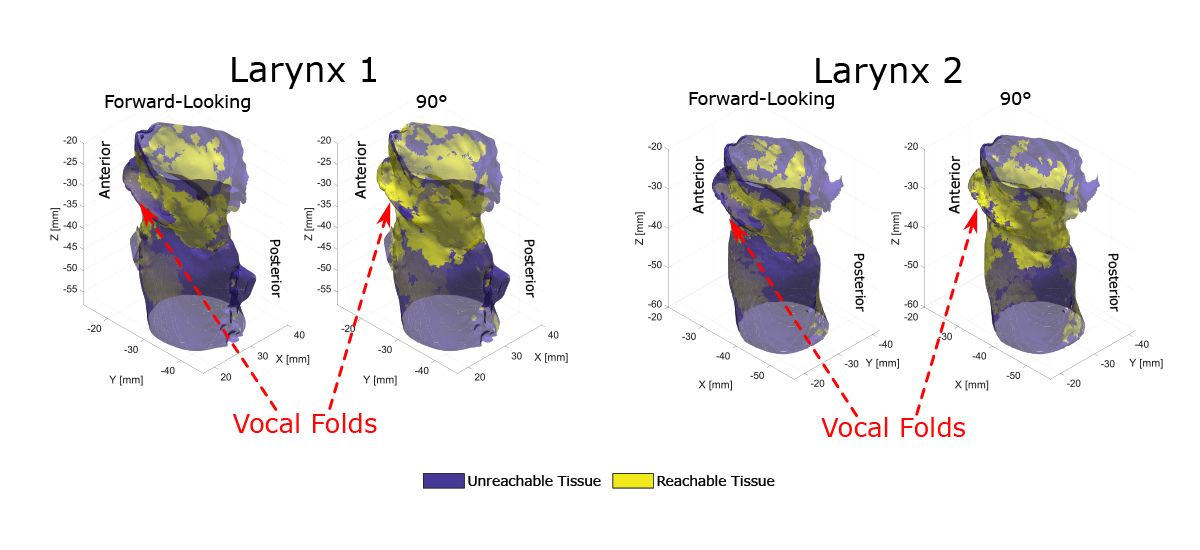
90° 侧面发射光纤可以到达以前无法到达的喉部区域。(图片所有权:Loris Fichera)
商用放射学软件可以基于医学图像重新构造三维形状。尽管如此,该软件使用起来仍具有挑战性,并且经常无法以 Fichera 和他的同事所要求的 STL 格式导出数据。该团队花了一周时间编写代码,将 CT 扫描转换为三维喉部渲染。
“使用 Medical Imaging Toolbox,我们只需点击几下鼠标即可加载整个数据集并创建三维渲染。此功能和导出数据功能非常重要:这意味着我们无需从头开始每个新设计。我们可以依靠已知的有效标准方法。Fichera 说道,“这为每个新设计节省了数周时间。”
Fichera 指导的研究生也将 Medical Imaging Toolbox™ 用于他的手术机器人课程。过去,学生需要使用放射学软件练习三维重建。“他们没有必要再使用该软件,”Fichera 说道。“现在我让他们用 MATLAB 来完成这种练习。”
仿真手术
创建虚拟喉部模型后,WPI 团队使用 File Exchange 中的开源 MATLAB 代码创建了一个常见商用内窥镜的模型。内窥镜的相机尖端位于右侧声带上方,激光光纤的尖端位于左侧声带上方。它以三个自由度移动。
“使用 Parallel Computing Toolbox,仿真运行大约需要 7 个小时。如果没有并行计算,这将需要更长的时间,可能需要几天。”
该团队使用运动规划算法创建了一个程序,对内窥镜在喉部的插入和运动进行仿真。研究人员将具有不同光纤的虚拟内窥镜部署到七个喉部模型中。该程序生成一个点云,表示仪器可以到达的所有喉部位置。
接下来,他们使用光线投射(一种游戏开发人员广泛用于仿真三维虚拟场景光照的计算方法)对从光纤尖端射出的激光束进行模拟。他们使用射线三角形相交算法来检测激光束到达的喉部组织。“我们逐个实际检查这些云点,然后考察激光光纤到达该云点并从这个位置发射光线,会到达什么组织。”
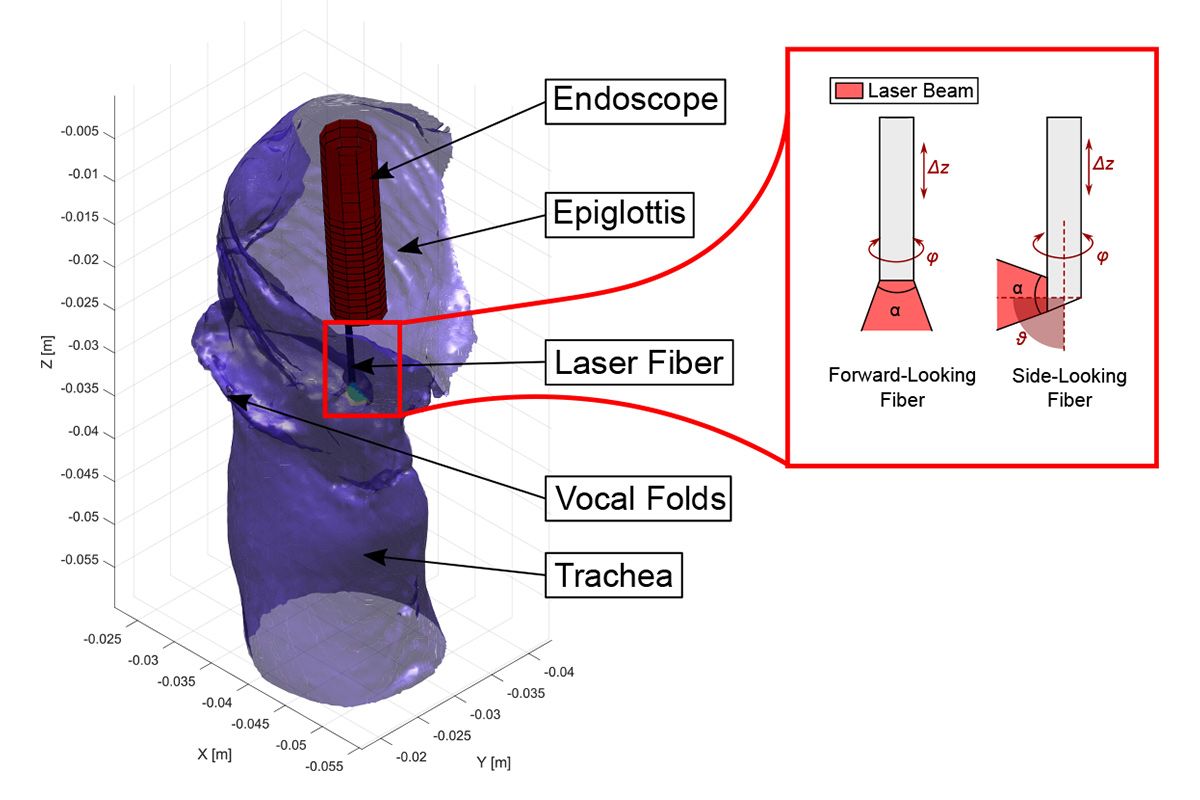
显示光纤自由度的内窥镜模型。(图片所有权:Loris Fichera)
他说,光线投射的计算成本很高,因此他们使用 Parallel Computing Toolbox™ 来加快速度。“我们不是遍历数千个视点并逐个投射光线,而是一次从尽可能多的点并行运行光线投射,然后汇总所有结果。使用 Parallel Computing Toolbox,仿真运行大约需要 7 个小时。如果没有并行计算,这将需要更长的时间,可能需要几天。”
他们发现 45°、70° 和 90° 度的光纤分别平均增加 50%、74% 和 84% 的可到达和治疗的总喉部组织。
设计下一代内窥镜
除了证明侧面发射光纤可以改进机器人喉部手术之外,这项研究还揭示了当今内窥镜的根本局限性。手术仿真显示在右侧声带附近的点云中有一个明显的缺口。“软件告诉我们,喉部有个部位很难到达,”Fichera 说道。“因此,如果患者的这个部位出现肿瘤,您将无法对其进行治疗。实际情况应该不会这样,我们首先想到的是我们的仿真出错了。”
“我们的想法是用我们自己版本的这种设备取代现在使用的内窥镜。无论我们想出什么设计,都可以在制造甚至接触任何物理仪器之前,先在 MATLAB 中进行仿真,看看它能否起到我们设想的作用,然后进行原型构建。”
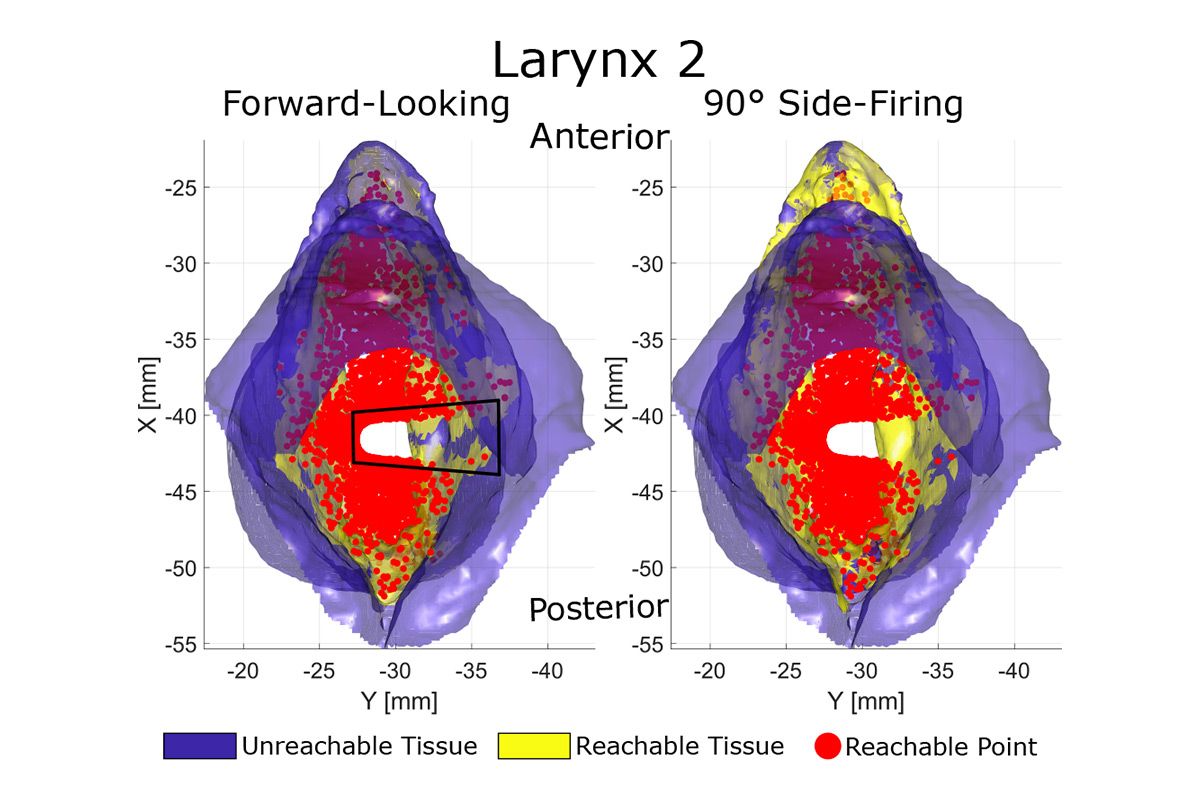
手术仿真在右声带附近的点云中发现当前使用的内窥镜无法到达的缺口。(图片所有权:Loris Fichera)
但令他们惊讶的是,Fichera 的医生同事证实,他们确实无法检测右侧声带。回到计算机程序,Fichera 的团队意识到这一缺口是内窥镜的偏心设计造成的,相机在一侧,光纤在另一侧,而外科医生很难将内窥镜旋转 360 度。
Fichera 说,当前用于喉部手术的内窥镜基于其他内窥镜的设计,而没有针对这种特定手术进行优化。WPI 团队计划基于他们的研究来开发新型内窥镜医疗设备。
“我们在启动这项研究时认为,我们的目的只是开发一种新光纤,但继续使用原有的仪器,”他说道。“但最终,结果告诉我们,我们还必须重新考虑内窥镜的设计。”
Fichera 和他的同事正计划使用他们的数据申请资助,并使用该资助开发一种全新设备。“我们的想法是用我们的这种设备版本取代现在使用的内窥镜。无论我们想出什么设计,都可以在制造甚至接触任何物理仪器之前,先在 MATLAB 中进行仿真,看看它能否起到我们设想的作用,然后进行原型构建。”