From Virtual Vehicle to All-Electric Off-Road UTV in Less Than a Year
Going Green with an All-Electric Utility Task Vehicle
Vanderhall Motor Works’ Brawley™ is an all-electric utility task vehicle (UTV). Also known as side-by-sides, UTVs are off-road vehicles popular with recreational users, farmers, and hunters. With 303 horsepower and a 140-mile driving range, the Brawley is designed to give users a powerful yet environmentally friendly ride over sand dunes and rocky terrain.
The Vanderhall team faced its own bumps and obstacles when it started its design process. Vanderhall’s conventional gasoline-powered vehicles were based on a General Motors® powertrain. The engineers started by swapping the internal combustion engine with another vendor’s electric powertrain hardware and software. Although EV powertrains are simpler with fewer components—just the battery, inverter, and electric motor—integrating the separate systems did not work out as the engineers anticipated.
“We needed the electric powertrain to communicate with all the other modules and controls from General Motors, such as the power steering and the anti-lock brakes,” says Christopher Johnson, CTO of Vanderhall. “None of the components communicated well. We ended up with a vehicle that was hard to drive.”
Vanderhall decided to develop a powertrain, motor control system, and anti-lock braking system from the ground up—a daunting task for a small, privately funded startup with a limited crew of engineers. The engineering team recognized that designing and testing their control algorithms virtually was key to minimizing the risk of finding errors when they moved to software-hardware integration and deployed code on a real off-road vehicle.

Vanderhall Motor Works’ Brawley, an all-electric utility task vehicle. (Image credit: Vanderhall Motor Works)
“Normally, it would take an army of coders years to write the software for a vehicle control system. Electric vehicles are in a fast-moving market; if we took a conventional development route, we would still just be dreaming about a product and all of our competitors would beat us to the punch.”
They built a vehicle model using Simulink®. A partnership with semiconductor maker NXP Semiconductor allowed them to quickly translate their Simulink code to run on NXP® automotive chips for simulating vehicle dynamics and predicting vehicle behavior before tests on a virtual vehicle. Model-Based Design allowed a group of three Vanderhall engineers to design, simulate, and deploy the Brawley prototype in just eight months. (NXP is a trademark of NXP B.V.)
“Normally, it would take an army of coders years to write the software for a vehicle control system,” Johnson says. “Electric vehicles are in a fast-moving market; if we took a conventional development route, we would still just be dreaming about a product and all of our competitors would beat us to the punch.”
Accelerating Software Development
“Vehicle Dynamics Blockset delivers incredible flexibility and enables us to create novel features for the vehicle. Using it, we can do all sorts of cool tricks by independently controlling the power, speed, and velocity of each wheel.”
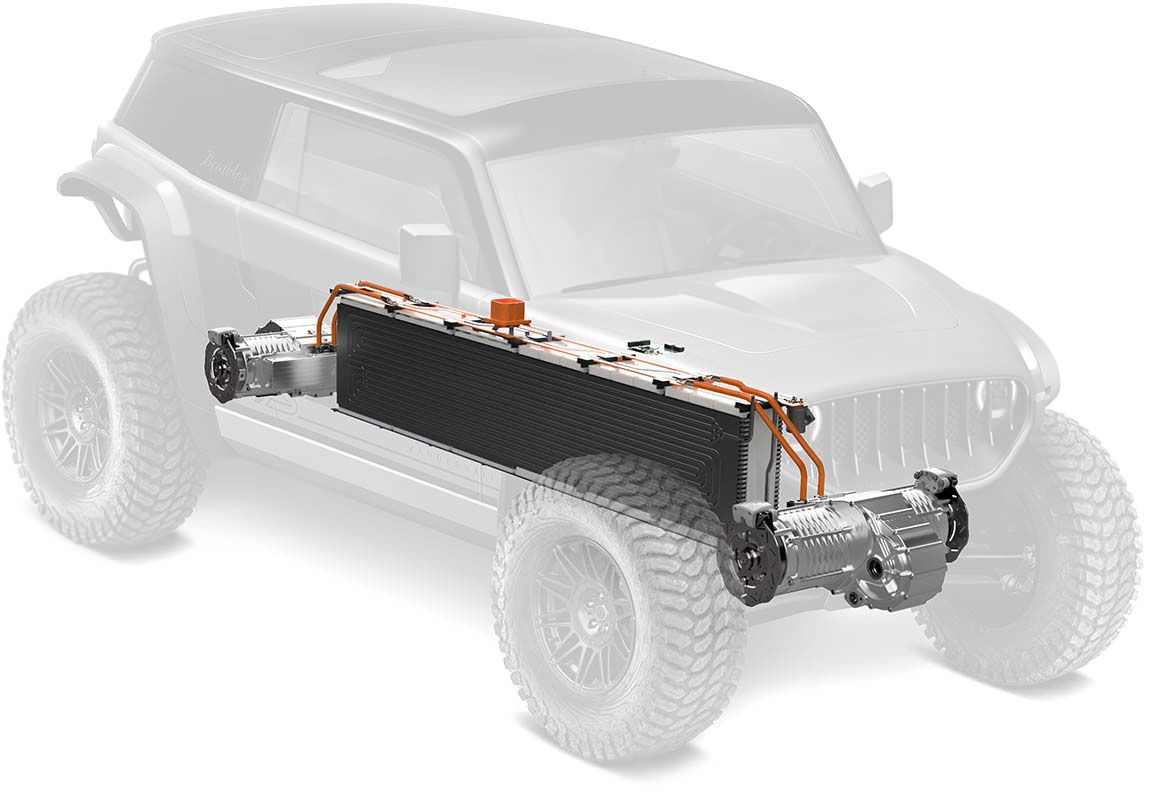
The Brawley powertrain has one motor per wheel and unique features that set it apart. (Image credit: Vanderhall Motor Works)
Several features such as, most notably, four electric motors (one for each 35-inch wheel), set the Brawley electric UTV apart from competitors. To provide a dynamic and exciting UTV experience, Johnson and his team knew early on that they needed direct control over each motor. This enables the UTV to drive fast on rough dirt roads, take quick sharp turns, and handle jumps.
The electric powertrain vendor could not accommodate this requirement: They were hesitant to change their hardware and were manually coding control algorithms, which made software redesign difficult.
Johnson decided to develop powertrain hardware in-house, selecting system parameters such as the size of the battery, the type of electric motor, and the system voltage. Once they had a hardware design and test hardware procured, the engineers needed to develop the anti-lock braking system, a motor control unit that determines speed and torque, and electronic stability control, which automatically controls individual wheel brakes to prevent skidding and loss of control during sharp turns. Manually coding control software was not an option, as Vanderhall wanted to get the vehicle to market quickly, so Johnson’s team turned to Model-Based Design.
The engineers used Simulink to design and build their vehicle control software. With Vehicle Dynamics Blockset™, they modeled the UTV’s motion and response, which let them finesse braking distance and assess the motor RPM at which the wheels lose traction.
By designing a powertrain with one motor per wheel, the engineers were able to add some unique features to the vehicle that sets it apart. Their proprietary anti-lock braking system, for instance, does not rely on repeatedly opening and closing pressure valves to prevent wheels from locking up. Instead, they use the electric motor at each wheel to adjust the torque in a way that prevents locking. The process offers fine control over braking.
“Vehicle Dynamics Blockset delivers incredible flexibility and enables us to create novel features for the vehicle. Using it, we can do all sorts of cool tricks by independently controlling the power, speed, and velocity of each wheel,” Johnson says. “To control those wheels, you need to create a model, a physics equation of what the vehicle will do. Knowing how much the Brawley weighs or the coefficient of friction between rubber and the road, for instance, allows you to model how fast the vehicle will accelerate or how fast a wheel spins based on the torque you apply.”
Having developed the software for motor control and the anti-lock braking system, the team needed to test this in conjunction with the battery. They used Powertrain Blockset™ to simulate the battery’s state of charge (SOC), a crucial number for an all-electric UTV. Lithium batteries are nonlinear, and their charge changes dynamically in a vehicle, Johnson says. “If you’re accelerating, your voltage will drop because you’re pulling a lot of energy out of the batteries, even though your capacity hasn’t changed much. Estimating your actual SOC in something where all of your measurements are constantly changing is very difficult, and that’s where Powertrain Blockset really helped out.”
They built a virtual vehicle with Simulink for real-time simulations of the powertrain and vehicle dynamics, as well as to evaluate how the control algorithms behave.
The engineers simulated for various edge cases, such as what happens when the vehicle does an emergency maneuver or when a high-voltage battery overheats, and implemented their control algorithms accordingly. This provided an accurate feel for how the vehicle behaves in the real world without requiring physical tests.
“We don’t need extensive real-world testing every time we do a code revision because we have such a good vehicle dynamic simulation, and we can see if our code will overcorrect for something and make the vehicle flip over, for example,” Johnson says. “We check traction control, stability control, and braking distance. The virtual vehicle helps speed up things and lets us test all these cases with less manpower and fewer physical vehicles."
Win-Win-Win
Model-Based Design allowed Vanderhall to frontload software development before it had all the vehicle hardware on hand. And the same core engineering team could take the concept from high-level code architecture to implementation and testing on a processor chip.
A few weeks after starting their software design process, the Vanderhall team was ready to test their code on hardware, using Embedded Coder® to generate C code that could be executed on a vehicle control microprocessor.
This was early 2020, and the pandemic shutdowns were starting to slow down the semiconductor industry. “We partnered with NXP to use their automotive processor, their engine control microprocessor units, and their link package,” Johnson says.
Not only did NXP make the high-performance automotive development microprocessor, MPC5777C, but the company also provided its Model-Based Design Toolbox to help Vanderhall engineers easily bridge the Simulink design to the NXP processor.
Razvan Chivu, manager of the Model-Based Design Toolbox group at NXP, says that most of his customers in the automotive industry use Simulink. “It is very important for us to have a way to link everything they have in Simulink with NXP hardware so that their work becomes easy for them. The most important justification for Model-Based Design Toolbox is its ability to act as a gateway between the MathWorks ecosystem and the NXP ecosystem.”
Because of that gateway, the Vanderhall engineers test their software early and often, smoothing the transition from virtual vehicle to processor-in-the-loop testing and speeding up prototype development. Vanderhall is now testing its production powertrain units and conducting test drives of its preproduction vehicles. It will be a few more months of durability testing and control code refinements before the Brawley is ready to hit the road, Johnson says. And when it does, it won’t mind the bumps. The Brawley will take them on in style.
“It is very important for us to have a way to link everything they have in Simulink with NXP hardware so that their work becomes easy for them. The most important justification for Model-Based Design Toolbox is its ability to act as a gateway between the MathWorks ecosystem and the NXP ecosystem.”
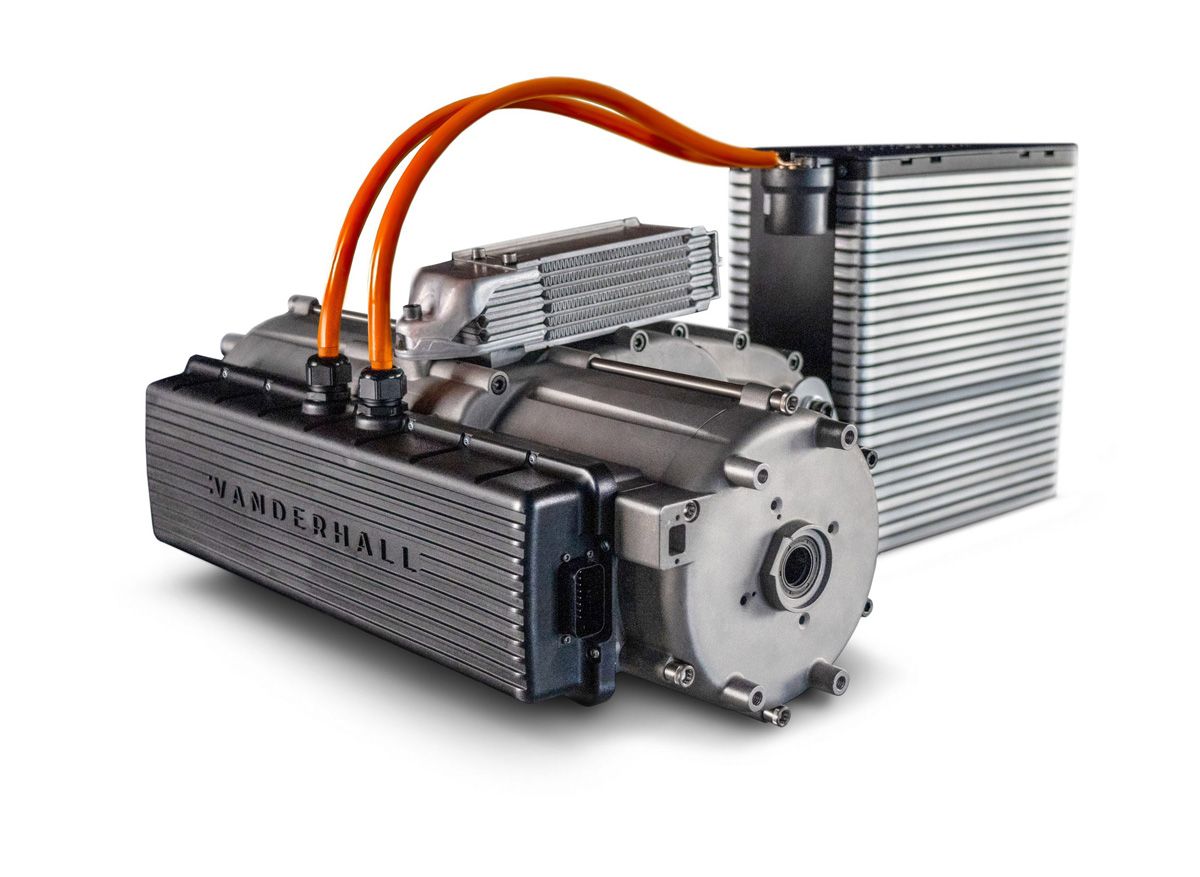
The Vanderhall Brawley electric powertrain motor. (Image credit: Vanderhall Motor Works)
Read Other Stories
AI / ROBOTICS
Autonomous Electric Tractor Brings Artificial Intelligence to the Field
California Vineyard Finds Driver-Optional Smart Vehicle Has Power to Spare
GREEN TECHNOLOGY
Unplugged: The New Way to Charge Electric Vehicles
Wirelessly Charging McLaren’s Fastest Road Car Ever
STARTUPS / GREEN TECHNOLOGY
Smart, Green Technology Is Changing the Way India Rides
Electric Scooter Reduces CO2 Emissions and Cures “Range Anxiety”