B&R Industrial Automation Improves Servo Drive Performance with Virtual Sensor Algorithms Developed Using Model-Based Design
“It would not have been realistic for our small team to meet a six-month deadline without Model-Based Design. If we had had to do it all in C, we wouldn’t even have started the project. The rapid analysis, visualization, and controller design we did in MATLAB and Simulink made the project possible.”
Challenge
Solution
Results
- Development time reduced by 70%
- Key performance metrics improved by 30% or more
- Customer design processes supported with specialized blockset

B&R Industrial Automation servo drives are used in a wide range of industrial automation processes, including packaging, printing, bottle filling, and blow molding. To improve servo drive performance, B&R recently added virtual sensor technology to the company’s ACOPOS series servo drives. This technology uses sophisticated algorithms to determine the position of loads that bend as the motor accelerates and decelerates.
B&R engineers used Model-Based Design with MATLAB® and Simulink® to implement the virtual sensors and to create a blockset that enables B&R customers to model and simulate automation processes incorporating the new servo drive technology.
“Early modeling and simulation with MATLAB and Simulink enabled us to quickly evaluate the feasibility of virtual sensors,” says Dr. Engelbert Gruenbacher, team leader of the firmware group at B&R. “By refining and optimizing the controller design in Simulink, we maximized the drive’s accuracy and speed while minimizing energy use.”
Challenge
B&R wanted to differentiate itself from its competitors by providing customers with resources that they could use to model and simulate automation systems based on B&R servo drives with virtual sensors.

The ACOPOSmulti from B&R.
Solution
B&R selected Model-Based Design with MATLAB and Simulink to speed the development of virtual sensor technology on ACOPOS servo drives.
Working with MATLAB and System Identification Toolbox™, the engineering team created a mathematical approximation of the motor load from measured input-output data.
Using Simulink and Control System Toolbox™ they created a state-space controller model that included a Kalman filter for state estimation.
In Simulink they ran simulations of the controller and plant, varying plant parameters to understand how different loads affected system behavior and tuning controller parameters to maximize performance.
Postprocessing of simulation results in MATLAB showed that virtual sensors could provide substantial performance gains, including a significant reduction in settling time (the period between the positioning command and the end of link oscillations).
The team integrated C code based on their Simulink models on the servo drive controller. They verified this C implementation by incorporating it into the Simulink system model as a C MEX S-function, running simulations, and comparing the simulation results with results produced by the original Simulink controller model.
The engineers created a Simulink blockset that includes parameterized blocks for the ACOPOS servo drive and a B&R synchronous servo motor. This blockset was verified through extensive system-level simulation and provided as C MEX S-functions. B&R’s customers use the blockset to model and simulate automation systems that use these B&R products.
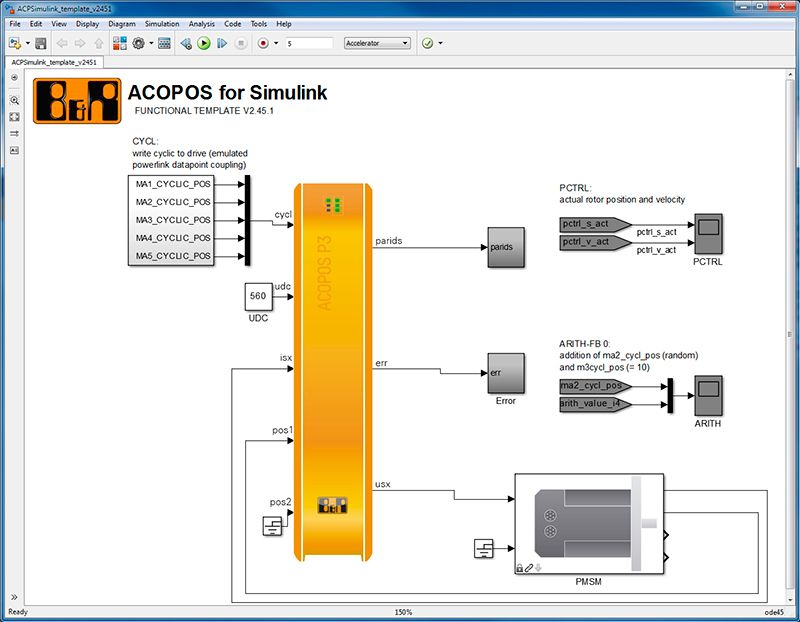
The ACOPOS Blockset for Simulink, which enables B&R’s customers to simulate machines before hardware is available.
Results
Development time reduced by 70%. “Developing and debugging the virtual sensor algorithms in C or a similar language would have required an enormous amount of time and effort,” says Gruenbacher. “We reduced development time by at least 70% using MATLAB and Simulink.”
Key performance metrics improved by 30% or more. “The controller we designed and refined in Simulink reduced settling time by 30% and increased position accuracy by at least 50%,” says Gruenbacher. “These gains enable our customers to shorten production cycles and improve quality.”
Customer design processes supported with specialized blockset. “More and more of our customers are using models in their own development processes, and the B&R ACOPOS blockset that we created in Simulink makes it easier for these customers to use our products,” notes Gruenbacher. “Their process engineers can use the blockset with Simulink to simulate machines before hardware is available and run tests that would be risky to conduct on a real machine.”