Automated Verification of Automotive Infotainment
Alexandra Tran, BMW
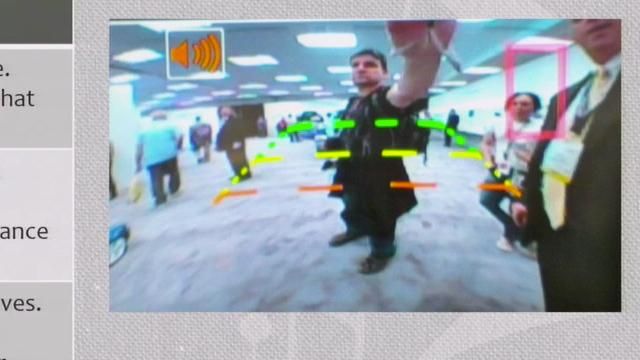
Conventionally, verification of the instrument cluster (IC) is reliant upon human visual perception, which is prone to error. Accordingly, assessing the accuracy of Assisted Driving View (ADV) is improved through the application of computer vision algorithms. ADV depicts up to five surrounding vehicles, each identified as either a car, truck, or motorbike.
For an ADV scenario, the test output is compared against the ground truth. An external camera records video footage of each ADV scene on an IC interface. A machine learning model identifies the positions and types of vehicles depicted. Subsequently, the collected data is compared, and discrepancies are automatically reported.
The video frames are calibrated using frame registration techniques. The ground truth objects are labeled consecutively. As a result, training data is acquired for the development of a motion-based, multi-object detector.
The machine learning model can validate the accuracy of ADV in a new software version compared to a verified standard version. Moreover, the accuracy of ADV can be assessed from real-world driving in varied weather and lighting conditions. The research methodology provides effective end-to-end testing of ADV.
Published: 29 Jun 2020
Featured Product