Overview
Driving simulators /driver-in-the-loop simulators consist of complex physics and mechanics along with hardware to mimic real-life driving scenarios. As ADAS and autonomous driving features add to these already complex systems, there is a strong need to test out multiple scenarios via driver-in-the loop simulators before deploying the control algorithms on the road. This webinar includes an overview of the vehicle dynamics simulation offering from MathWorks followed by a description of how you can transition from desktop simulation to real-time driver-in-the-loop simulation.
Highlights
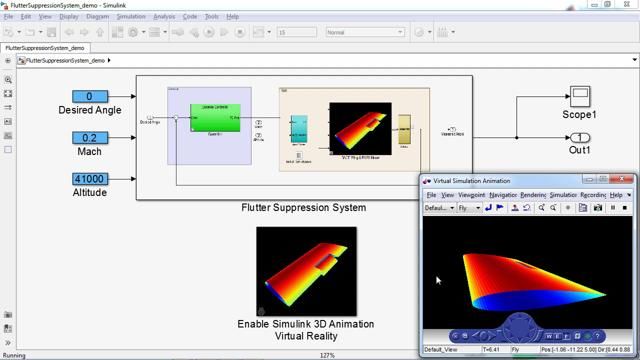
- Introduction to Vehicle Dynamics Blockset™ and the Unreal Engine interface to visualize driving scenarios
- Creating a real-time simulator with Simulink Real-Time™ and Speedgoat target hardware
- Setting up a driving simulator with pedal and steering wheel hardware to perform driver-in-the loop testing
About the Presenters
Mike Sasena is a product manager, focusing on the automotive products developed at the MathWorks office in Novi, Michigan. Prior to joining MathWorks, Mike spent 14 years working on model-based system engineering projects for the automotive industry. His experience includes hybrid electric vehicle modeling for fuel economy analysis, Model Predictive Controls development and heterogeneous system simulation. Mike received his PhD in Mechanical Engineering from the University of Michigan in 2002.
Shankar Abhinav is an Application Engineer at MathWorks. His expertise is in hardware-in-the-loop and rapid control prototyping for verification and validation of advanced control algorithms for complex cyber physical systems. He received his PhD in Electrical Engineering at University of Texas at Arlington in 2017. His graduate and postdoctoral research work focused on modeling and distributed control of power electronic devices for small scale power systems.