Differential Equations and Linear Algebra, 2.7c: Laplace Transforms and Convolution
From the series: Differential Equations and Linear Algebra
Gilbert Strang, Massachusetts Institute of Technology (MIT)
When the force is an impulse δ (t), the impulse response is g(t). When the force is f(t), the response is the “convolution” of f and g.
Published: 27 Jan 2016
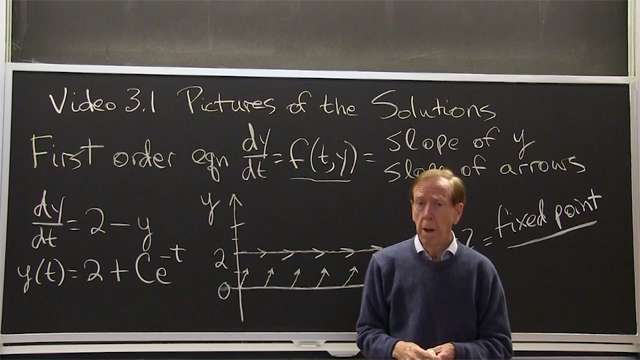
OK. This is one more thing to tell you about Laplace transforms, and introducing a new word, convolution. And so we're going to find our old formula in new language, a new way. But the formula is familiar. And the problem is our basic problem, second order, linear, constant coefficient with a forcing term.
And we know that the Laplace-- and I'll take zero boundary conditions. So that the Laplace transform is just s squared y, sy, and that's the transform of our equation. No problem.
OK, now I'll divide by that. So I move that as 1 over, and I call it G. So this G is 1 over s squared, plus Bs plus C. And that has the name transfer function. And then this is the transform of the forcing term.
OK. So here we have a nice formula for y of s, after I do that division. It's a product. The transform of the solution that we want is that transform times that transform. This is the transform of the impulse response. This is the transform of the right-hand side. Now I just have a Laplace transform question.
Suppose my transform is one function of s times another function of s, what is the inverse transform? What is the inverse transform? What function y of t gives me G times F? And I'm just going to answer that. The answer is the g and the f, those are the ones that give that. But I do not just multiply those. The new operation that gives the right answer is called convolution. And I'll use a star.
So right now I'm going to say what does that convolution mean. So this is a general question. If I have two functions multiplied together, then I want the inverse transform, then I take the separate inverse transforms, little g and little f, and I convolve them, I do convolution. And let me tell you what convolution is.
So convolution is-- here is the formula for convolution. It's an integral from 0 to t of one function-- maybe I better use capital T, better-- times the other function, integrated. That's what convolution is.
So what have I achieved here? The same old formula. The formula which we described way back at the beginning as inputs f, growth factors over the remaining time, g. Put all those together by integration. Put all the inputs with their growth factors. Integrate to put them all together. And that is y. So it's a familiar formula, with only a new word. But you see that I could jump to the answer, once I knew about the convolution formula, and I knew that this is the function whose transform its-- let me say again. Its transform is GF.
So if I multiply transforms, I convolve functions. And looking at it the other way, if I multiply functions I would convolve their transforms. So convolution grows the number of functions that we can deal with on Laplace transform. Because it tells us what to do with products, capital G capital F. Or it tells us what to do with little g little f.
So I'm almost through, because I don't plan to check. I could. But this isn't the right place. The book does it accurately. I don't plan to check that this statement is true that the transform of that one is that one. But it is true. But I do plan to do an example.
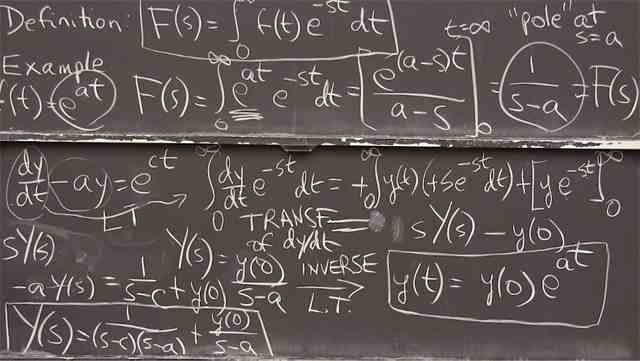
Now second degree gets a little messy. So let me do a first degree example. Example, I'll take the equation dy dt minus ay. That's our usual first degree differential equation. And I'll take e to the ct on the right-hand side. OK. I'm doing those, because I can take the transforms and check everything.
So let me transform both of those starting from 0. So the transform of that is s y of s, minus a y of s, equals, well I know the transform f of s. I know the transform of that is 1 over s minus c. So this is just, s minus a factors out. So well y of s is 1 over s minus a, and s minus c.
Again, this is the simplest differential equation with a forcing term that I could use as an example. So now I'm looking for what is y of T. I'm looking for y of T. And I'm now going to use the language of convolution.
This is the transform of e to the at. This is the transform of-- so you see I'm thinking of that as the transform of e to at, and the transform of e to the st. So there is one factor. And there's the other factor.
So according to the convolution formula, I can write down the inverse transform, the y of t I want as the integral. I'm just going to copy the convolution. But I know the functions for that. So it's an integral from 0 to t. What do I have? g of t minus t. What is the inverse transform of 1 over s minus a? It's e to the a t minus t. And what is the inverse transform of 1 over s minus c? e to the cT dT.
So I have used the-- I've just put in what I know in the convolution formula. And this should be the correct answer. And I can do this integral. And what do I get? Well, I'm pretty sure that I get e to the-- down below there will be a-- you see I'm going to combine those exponentials. So I'll have a c minus a. It comes out perfectly.
e to the ct, minus e to the at. That's the right answer. It's not only what the convolution formula tells me, it's what I know. So that example is a good one to show that when-- so I didn't use partial fractions. Normally I would separate this into partial fractions, and then I would recognize those two pieces of the answer.
I didn't do that this time. Instead of using partial fractions, the algebra, I used the convolution formula, and did the integral or almost did it. We can do it. And we get that answer.
OK. So the point of this video is simply to introduce the idea of a convolution, which is the quantity we need, the function we need, when the transform is a product of two transforms. OK. Thank you.