Framework for Virtual and Physical Testing of Automated Driving Systems
Vladislav Kocián, TÜV SÜD
The massive expansion of automated driving (AD) functions brings huge challenges in terms of design and development, but also in function validation and the certification process. To ensure the safety of such systems, it is essential to evaluate automated driving systems within the mandatory certification process before they are deployed on the road. The number of regulations and standards that consider the safety of AD gradually increases, and current safety standards and regulations still must be adopted and enhanced. Having a strong legislative basis is the key factor for the introduction of highly automated vehicles to the market. For conventional vehicles, we have a well-established homologation process. For automated driving, a theoretically infinite number of traffic situations must be tested to prove the safe decision making of the vehicle.
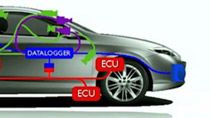
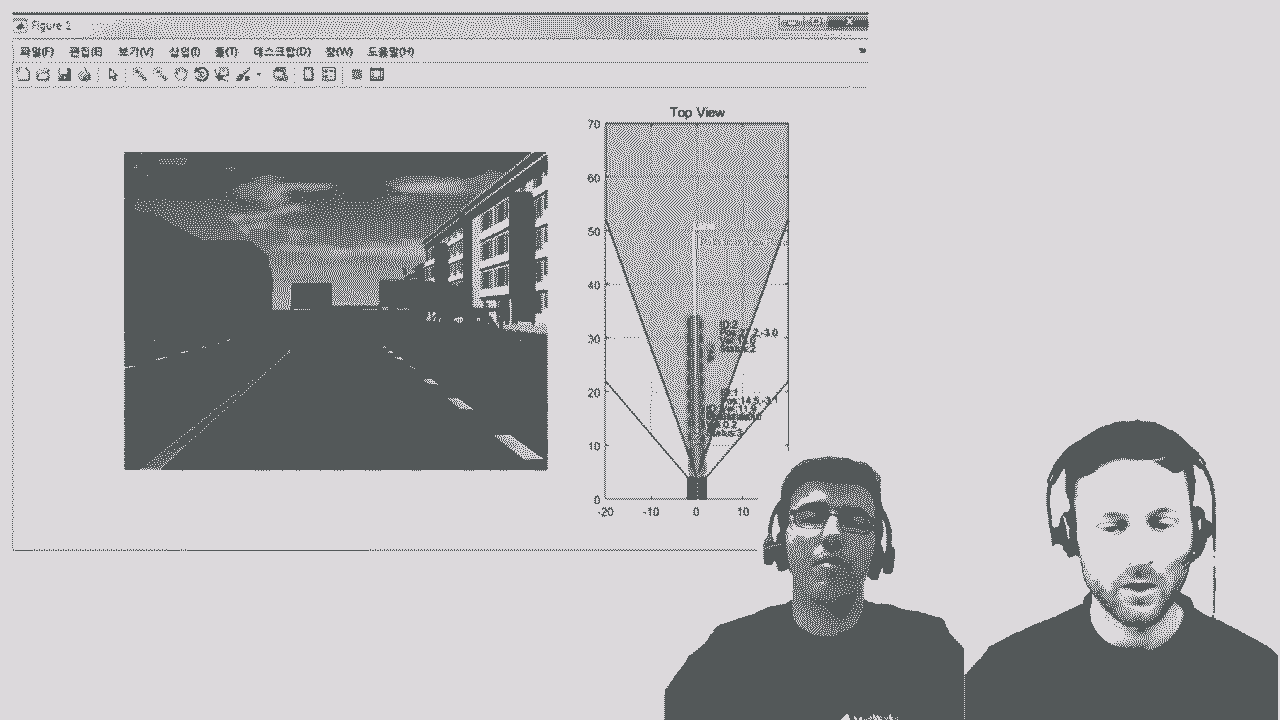
A promising method to overcome this matter is the scenario-based approach, focused on the critical situations represented by a significant sample of harmonized scenarios. Since confronting conventional physical driving tests with this test effort is not feasible anymore, virtualization of testing methods by means of computer simulation must be adopted. To supply a future certification process of automated driving systems, TÜV SÜD is developing a methodology for a scenario-based evaluation of AD systems that combines a virtual-based approach and physical testing while guaranteeing repeatability of test conditions. Physical testing provides real-world data used for parametrization and validation of the simulation models. In this presentation, these models will be introduced as well as the overall architecture of the simulation toolchain, which is strongly based in MATLAB® and Simulink®. Other automated, driving-related tools from MathWorks are utilized as well. The workflow within this testing methodology for a specific ODD will be demonstrated.
Published: 29 Jun 2020
Featured Product