TUfast Eco Team's Longitudinal Cruise Controller
From the series: Student Teams Share Their Keys to Success
Alexander Hammerl, TUfast
Maximilian Mühlbauer, TUfast
Maximilian Amm, TUfast
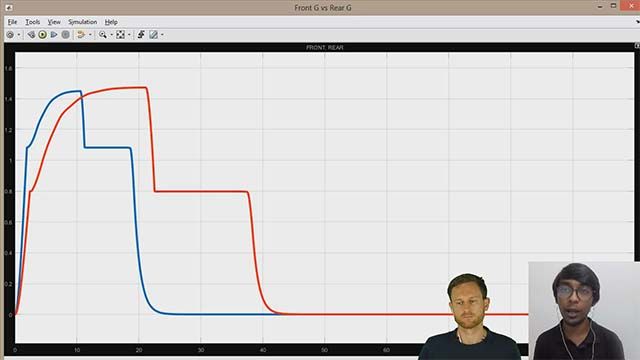
Maximize efficiency by using an algorithm-based driving strategy with a vehicle model and GPS track data. Maximilian Amm, Alexander Hammerl, and Maximilian Mühlbauer designed a velocity controller for their EducEco / Shell Eco Marathon vehicle. Hammerl and Mühlbauer join Christoph Hahn, of MathWorks, to present their vehicle model and discuss their integration of a longitudinal velocity controller.
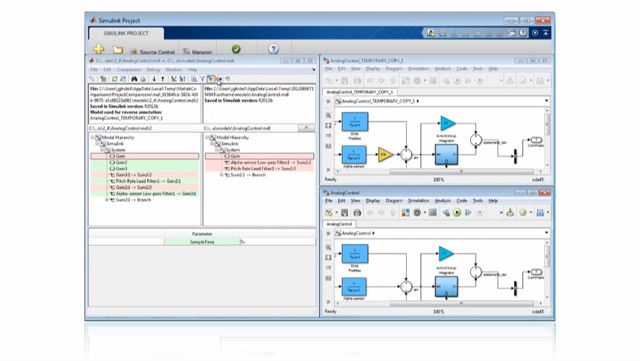
First, Alexander Hammer presents how to set up a vehicle model with focus on modelling losses, the driver, and the circuit to generate an optimal track-specific driving strategy using a genetic algorithm. You’ll get a complete model overview of the components used for the simulation including the circuit model, vehicle model, driver, and controls model.
Next, Maximilian Mühlbauer talks about using the results of the simulation. Maximilian explains how hardware implementation is a crucial part in the development process, and the advantages and disadvantages of a cruise control system.
TUfast Eco Team has specialized in efficiency competitions where the goal is to travel while using as little energy as possible. Having a cruise control system can be a huge advantage for driving performance. Thank you TUfast Eco Team for presenting the approach.
Recorded: 12 Jan 2017