Scenario-Based Cosimulation of Autonomous Systems Using RoadRunner and CarMaker
Deva Hanuma Kishore Naidu Avisineni, Bosch Global Software Technologies
Automated driving features are a combination of multiple complex systems. Testing and validation of these features requires millions of kilometers of scenarios; however, this is not feasible to test on on-road systems. In view of different levels of automation, there is a dire need of a modular and scalable platform that allows X-in-the-loop simulation.
Having a configurable vehicle model used for software-in-the-loop testing provides substantial advantages compared to the physical test drives. It enables automated, efficient, and extensive testing methods with minimal risk and costs for time and equipment.
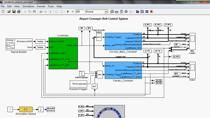
The current simulation framework allows you to create test scenarios with predetermined traffic behavior. However, there is a need for systematic usage of scenarios for testing and validation of automated driving systems, needed particularly in modeling the driving environment and traffic dynamics. This allows a realistic, robust, and usable environment of the test scenarios.
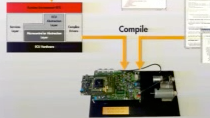
In this talk, learn about a cosimulation framework between RoadRunner from MathWorks and CarMaker from IPG and how to use it with a third-party simulation framework for validation. See how to bring realistic traffic models into the driving environment to ensure all complex and corner case scenarios are covered during the validation. This cosimulation platform allows you to test millions of kilometers by combining vehicle simulation with virtual simulation software environments.
Published: 7 Dec 2023
Related Products
Learn More
Featured Product