MathWorks Research Summit
MathWorks Research Summit is an annual invitation-only event to meet inspiring peers from your and adjacent research areas and set directions that redefine the frontiers of research with impact and value. This multidisciplinary summit provides a forum for candid exchange with highly acclaimed thought leaders, industry and government experts, and MathWorks senior management about technical challenges, opportunities, and solution attempts to help focus and collaborate on promising research efforts.
The summit features lively discussions interspersed with exciting technical talks to disseminate knowledge, germinate ideas, inspire applications, discover successes in related fields, recognize trends, and identify research needs. Participants can also socialize and network with people who govern professional organizations, have experience in organizing research programs and projects, and share guidance on workforce teaching and training.
Invited Talks from the 2025 edition

The Interplay Between AI and Power Systems
Learn how researchers at the Power and AI Initiative (PAI) at Harvard are investigating the impact of AI on the future of power grid operations.

Expeditions Towards Human-Robot Teaming at the Extremes
Discover how researchers at Northeastern University's Robotics and Intelligent Vehicles Research Laboratory are teaming humans with robots.

Machine Learning in Particle Physics
Learn how artificial intelligence is supporting researchers in high-particle physics.
Invited Talks from the 2023 edition

AI-Assisted Sensing & Control at Gravitational Wave Detectors
Learn how researchers at MIT LIGO labs used reinforcement learning in MATLAB and Simulink to enhance the sensitivity of gravitational wave detectors, improving black hole and neutron star detection.

Studying Cheetahs Through the Lens of Robotics
Learn how Researchers at the African Robotics Unit (ARU) study the biomechanics of cheetahs in South Africa to build agile robots using deep learning.

Open and Reproducible LLM of Code
Discover how open and reproducible large language models, including initiatives such as BigCode and StarCoder, are transforming code development and adoption of generative AI.

Discover how GraphBLAS combines graph algorithms and sparse matrix operations with semirings to improve numerical computations of sparse matrices in MATLAB.
Invited Talks from the 2019 Edition

Control Systems and the Quest for Autonomy
Autonomy is the ability to achieve goals under uncertainties and metrics. Learning control, which is essential for autonomy, should rely on prior knowledge, use simplified models, take full advantage of smart data, and incorporate active learning.

Real-Time Motion Planning for Collaborative Robot Arms
Convex feasible set algorithm (CFS) is presented as an efficient nonconvex optimization approach for safe and efficient real-time motion planning of collaborative robot arms.

MATLAB Code Can Easily Run Much Faster Than You Think!
A short presentation of several effective MATLAB coding techniques that result in significant run-time speedups, showing that MATLAB can often be made to run much faster using very simple techniques.

Enhancing Learning by Integrating Theory and Practice
This talk aims to strengthen the teaching of automatic control, digital control systems, and advanced control in the engineering curricula of B.S. and M.S. courses by using appropriate approaches to improve the learning outcomes for students.

Student Projects Modeling the First Landing on the Moon
In this presentation, students use MATLAB and Simulink to simulate the moon landing as historically performed during the Apollo program. The challenge was to model the lunar module and to describe the moon and all flight conditions accurately.
Invited Talks from the 2018 Edition

Neural Networks – Cornerstones in Machine Learning
The talk explains common neural networks, several industrial applications of neural networks, and statistical analysis techniques. In addition to MATLAB and Simulink, apps can be found in Statistics and Machine Learning and Deep Learning Toolboxes.

Realizing the Grand Vision of IoT: Normal Forms and Decision Support
Cyber-physical systems framework developed by NIST aims to support the development of freely composable Internet of Things systems in an integrated development, monitoring, and assessment environment.

How the Heart Turns Metabolic Fuel into Mechanical Work
Computer simulations probe how the heart turns metabolic fuel into mechanical work.

A MATLAB Toolbox for Robust Statistics: Use in Policy Research
The use of Flexible Statistics and Data Analysis Toolbox (FSDA) in complex applications and for policy research is illustrated by the developers of the European Commission and the University of Parma.

Collaborative Robotics: Opportunities, Challenges, and Use Cases
This talk provides an overview of the ongoing research on collaborative robotics at the Robotics and Intelligent Vehicles Research Laboratory (RIVeR Lab) at Northeastern University.

The Particular Nature of Molecular Information in Engineered Biochemical Communication Systems
Define and characterize information flow in communication systems based on molecule exchange and biochemical reactions with the help of simulations realized through SimBiology.
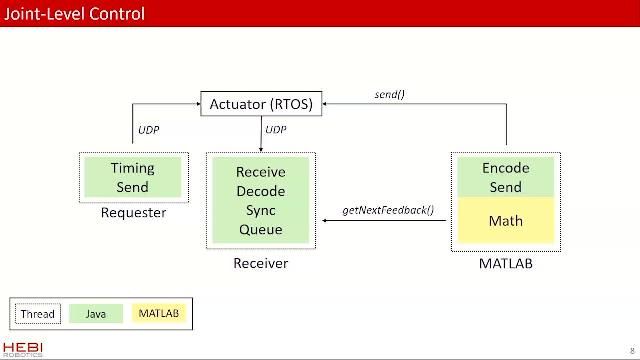
Achieving Real-Time Robotics Control with MATLAB
Use the HEBI Robotics API for MATLAB and execute robot control algorithms in real-time directly from MATLAB scripts.

Technology for a Planet in Balance
National Geographic Engineers are tackling our planet's challenges with the help of MATLAB to create new platforms to explore, monitor, and tell the story of our planet's vital systems.

Smart City Pilot Projects Using LoRa and IEEE802.15.4 Technologies
Measurement campaigns concerning the coverage of the LoRa technology in a real urban environment and description of a large-scale deployment of a smart lighting infrastructure in an Italian municipality.

Sensor Spoofing: Attacks, Consequences, and Countermeasures
Design sensor fusion algorithms that are resilient to malicious attacks.

Data-Driven Robust Control of Insulin Therapy
Design a controller for the artificial pancreas for closed-loop insulin therapy in Type-1 diabetes with data-driven methods for robustness to uncertain future meals. Evaluate the technique on virtual patient models using MATLAB.
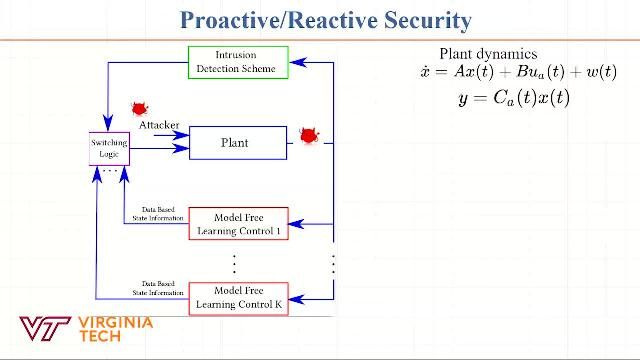
A Reinforcement Learning Framework for Smart, Secure, and Efficient Cyber-Physical Autonomy
A proactive defense control mechanism for maximizing system unpredictability by dynamic stochastic switching of attack surfaces while optimally controlling the system using a Q-learning framework.
Invited Talks from the 2017 Edition

New Trends in MEMS Design with Implications for Modeling and Simulation
Learn about issues in increasing the use and value of data analytics in MEMS as well as methodologies, technologies, and software tools to overcome the challenges in creating MEMS based products.

Amazing New Developments in Medical Ultrasound
This plenary talk describes recent innovations in medical ultrasound and ultrasound research, simulations, and research systems using MATLAB.

FINDER: Development, Test, Use
FINDER is a portable radar used by first responders to detect motion and characterize signals to identify the heartbeats and respiration of trapped and buried disaster victims.
RF Communications and Sensing Convergence: Theory, Systems, and Experiments with MATLAB in the Loop
Develop theory and system concepts for simultaneous radar and communications. Draw upon information and estimation theory to develop bounding performance. Employ experiments with MATLAB in the loop to demonstrate concepts.