Two-Degrees-of-Freedom Non-Planar Robotic Manipulator Case Study | Teaching Rigid Body Dynamics, Part 3
From the series: Teaching Rigid Body Dynamics
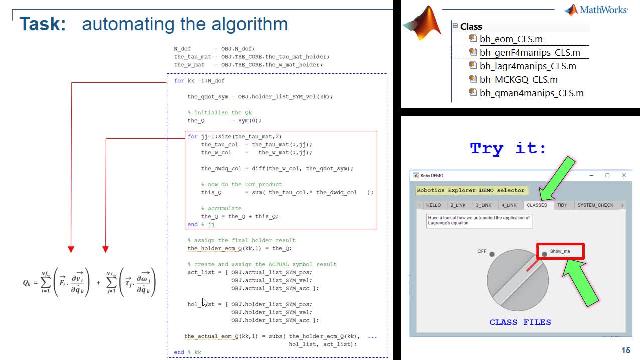
The workflow pattern introduced in the first case study in this series is reapplied to a larger two-degree-of-freedom system.
Published: 30 Oct 2017