What is Motor Control Blockset?
Motor Control Blockset provides Simulink blocks and reference examples for developing and deploying motor control algorithms as optimized C and HDL code on target microcontrollers, FPGAs, or systems-on-chip (SoC).The blockset includes Park and Clarke transforms, sensor decoders, sensorless observers, a space-vector generator, MTPA and other blocks for creating speed and torque controllers for implementing Field-Oriented Control and other motor control algorithms.
Reference examples included in Motor Control Blockset help you understand how to develop, tune, and validate motor control algorithms using desktop and real-time simulation. These examples cover closed-loop control for induction motors, switched reluctance motors (SRM), brushless DC motors (BLDC), and permanent magnet synchronous motors (PMSM). You can reuse the same algorithms to generate production-ready, compact, and traceable fixed- or floating-point code. Furthermore, you can use the reference examples to enable automatic deployment on supported hardware kits.
Published: 25 Sep 2023
Motor Control Blockset simplifies designing and implementing motor control algorithms by providing reference examples and libraries of prebuilt blocks including math transforms and control blocks like MTPA that you can use to generate C and HDL code optimized for your motor control application.
You can use the reference examples to implement motor control algorithms for motor types including induction motor, switched reluctance motor, brushless DC motor (BLDC) and permanent magnet synchronous motors for implementing sensored and sensorless motor control algorithms.
Motor Control Blockset includes decoders for Hall sensor, quadrature encoders and resolvers as well as sensorless estimators like flux observer, sliding mode observer, pulsating high frequency observer and extended EMF observer.
Motor Control Blockset provides prebuilt instrumented test to estimate stator resistance, inductance, and mechanical parameters of your motor.
Using these parameters in the provided motor modeling block, you can create accurate motor simulations.
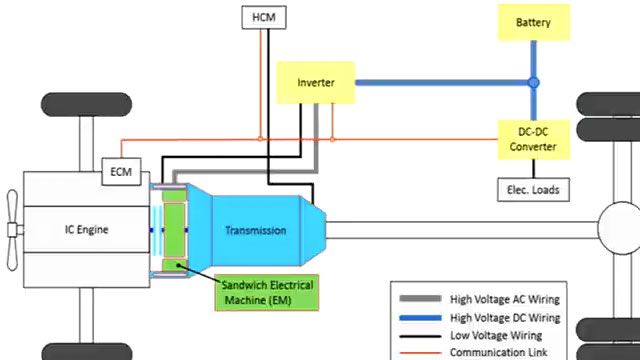
By combining these motor models with the average value inverter block and your motor control algorithm, you can create closed loop simulation models.
Reference examples show how you can switch to higher fidelity plant models developed with Simscape Electrical to simulate power electronic switching and other effects.
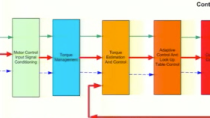
Motor Control Blockset also provides scripts to compute the initial control gains based on the estimated parameters.
Additionally, you can further fine tune these gains using the Field Oriented Control Autotuner block.
So you can use the reference examples to quickly develop and test motor control algorithms through closed loop desktop simulation, real time testing, and to generate efficient code for deployment on FPGAs or microcontrollers from the model to many popular supported microcontrollers and FPGAs.
Alternatively, for microcontrollers and FPGAs not supported currently, you can follow the algorithm export example to generate algorithmic code and integrate it with your custom driver code.
Finally, to ease validation, Motor Control Blockset reference examples include a host model that lets you control the target hardware so that you can start or stop the motor, specify the motor speed, and monitor output signals like speed and current.
For more information, please visit the Motor Control Blockset product page on mathworks.com and download a trial to check out the reference examples.
Featured Product