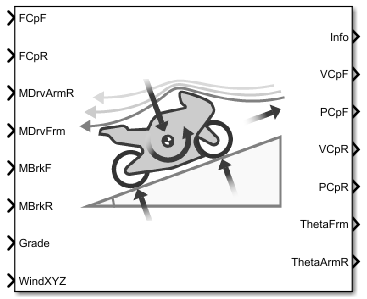
Motorcycle Body Longitudinal In-Plane
Libraries:
Powertrain Blockset /
Vehicle Dynamics
Vehicle Dynamics Blockset /
Vehicle Body
Description
The Motorcycle Body Longitudinal In-Plane block implements a longitudinal in-plane motorcycle body model to calculate longitudinal, vertical, and pitch motion. The block accounts for:
Mass of the frame, rear arm, front upper fork, front lower fork, front wheel, and rear wheel
In-plane dynamic effects of the frame, front lower fork, front wheel, rear wheel, rear suspension, front suspension, rear wheel damper, rear arm, and chain
External forces, external moments, and aerodynamic drag
Road incline
Weight distribution between the axles due to acceleration
Consider using this block to represent motorcycle motion in powertrain and fuel economy studies, for example, in studies with heavy breaking or acceleration or road profiles that contain larger vertical changes.
The block uses rigid-body vehicle motion, suspension system forces, and wind and drag forces to calculate the forces on the motorcycle frames. The block then determines the position and velocity of motorcycle at the front and rear contact patches.
Layout
To determine the rigid-body motorcycle motion, the block uses right-handed (RH) Cartesian reference frames systems attached to the motorcycle. i, j, and k are orthogonal unit vectors attached to the frame and swing arm, respectively.
| Frame | Variable in Figure | Description |
|---|---|---|
| Road | x, z | Road-fixed coordinate system. x is along road grade, and z points downward. |
Motorcycle main frame
| OFrm | Main frame origin |
GFrm | Center of mass (CM) of the main frame with respect to OFrm, along iFrm and kFrm, respectively | |
GRdr | CM of the rider with respect to OFrm, along iFrm and kFrm, respectively | |
ϴfrm | Main frame rotation about jFrm relative to forward projection of iArmRr unit vector | |
Upper fork
| OFrkUp | Upper fork origin |
GFrkUp | CM of the upper fork with respect to OFrkUp, along iFrkUp and kFrkUp, respectively | |
Lower fork
| OFrkLw | Lower fork origin |
GFrkLw | CM of the lower fork with respect to OFrkLw, along iFrkLw and kFrkLw, respectively | |
Rear arm
| OArmRr | Rear arm origin |
GArmRr | CM of the rear arm with respect to OArmRr, along iArmRr and kArmRr, respectively | |
ϴra | Rear arm rotation about jArmRr relative to forward extending line parallel to ground plane with origin OArmRr | |
Front wheel contact patch
| OCpF | Front wheel contact patch origin |
Rear wheel contact patch
| OCpR | Rear wheel contact patch origin |
Use the parameters in this table to specify the geometric layout of your motorcycle.
| Parameter | Variable in Figure | ||
|---|---|---|---|
Initial conditions | Position | Rear contact patch longitudinal coordinate, CpRrX0 | OCpR with respect to
road-fixed coordinate system, along |
Rear contact patch vertical coordinate, CpRrZ0 | OCpR with respect to
road-fixed coordinate system, along | ||
Pitch angle of rear arm, ArmRrAng0 | θra | ||
Pitch angle of main frame, FrmAng0 | θFrm | ||
Fork length, FrkFrL0 | df | ||
Frame | Center of mass location, FrmCmPxz | GFrm with respect to OFrm, along iFrm and kFrm, respectively | |
Length, FrmLen | FrmLen | ||
Rider | Center of mass location, RdrCmPxz | GRdr with respect to OFrm, along iFrm and kFrm, respectively | |
Front Fork | Upper | Position, FrkUpCmPxz | GFrkUp with respect to OFrkUp, along iFrkUp and kFrkUp, respectively |
Offset, FrkOfs | FrkOfs | ||
| Lower | Position, FrkLwCmPxz | GFrkLw with respect to OFrkLw, along iFrkLw and kFrkLw, respectively | |
Rear Arm | Position, ArmRrCmPxz | GArmRr with respect to OArmRr, along iArmRr and kArmRr, respectively | |
Length, ArmRrLen | ArmRrLen | ||
Wheels | Front | Radius, WhlFrR | WhlFrR |
| Rear | Radius, WhlRrR | WhlRrR | |
Suspension | Front | Equilibrium length, FrkLwL0 | df |
| Rear | Equilibrium angle, ShkRrAng0 | θFrm | |
Input Signals
You can use these block parameters to create additional input ports. This table summarizes the settings.
Input Signals Pane Parameter | Input Port | Description |
|---|---|---|
| External forces | FExt | External longitudinal and vertical forces applied at equivalent rider and motorcycle center of mass (CM). |
| External moments |
| External moment about equivalent rider and motorcycle CM, for example, moment due to rider physical motion. |
| External front wheel moment | MWhlF | External moment at the front wheel GWhlFr, for example, wheel motors and external intermittent friction-related disturbances. |
| External rear wheel moment |
| External moment at the rear wheel GWhlRr, for example, wheel motors and external intermittent friction-related disturbances. |
Grade angle |
| Road grade angle. |
Wind velocity |
| Wind speed. |
Ambient temperature | Temp | Ambient air temperature. Consider this option if you want to vary the temperature during run-time. |
Suspension System
Use the Suspension type parameter to specify the type of suspension.
Setting | Description |
|---|---|
| Block models the suspension force and moment as a spring-damper system:
|
User-defined | Input the suspension force and moment:
|
Wind and Drag Forces
The block subtracts the wind speeds from the vehicle velocity components to obtain a net relative airspeed. To calculate the drag force and moments acting on the motorcycle, the block uses the net relative airspeed.
Power Accounting
The block accounts for the power transferred, not transferred, and stored.
| Bus Signal | Description | ||
|---|---|---|---|
|
|
| Mechanical power from longitudinal external force |
| Mechanical power from vertical external force | ||
| Mechanical power from external pitch moment | ||
|
|
| Mechanical power loss from longitudinal drag force | |
| Mechanical power loss from vertical lift | ||
| Mechanical power loss from pitch moment drag | ||
|
|
| Rate change in gravitational potential energy | |
| Rate of change of longitudinal kinetic energy | ||
| Rate of change of vertical kinetic energy | ||
| Rate of change of rotational pitch kinetic energy | ||
| Stored spring energy from front suspension | ||
| Stored spring energy from rear suspension | ||
Ports
Input
Output
Parameters
References
[1] Sharp, R. S. “The Stability and Control of Motorcycles.” Journal of Mechanical Engineering Science 13, no. 5 (1971): 316–329. https://doi.org/10.1243/jmes_jour_1971_013_051_02.
[2] Giner, David Moreno. “Symbolic-Numeric Tools for the Analysis of Motorcycle Dynamics. Development of a Virtual Rider for Motorcycles Based on Model Predictive Control.” PhD diss., Universidad Miguel Hernández de Elche, 2016.
Extended Capabilities
Version History
Introduced in R2021b