Define Virtual Vehicle Components: Motorcycle
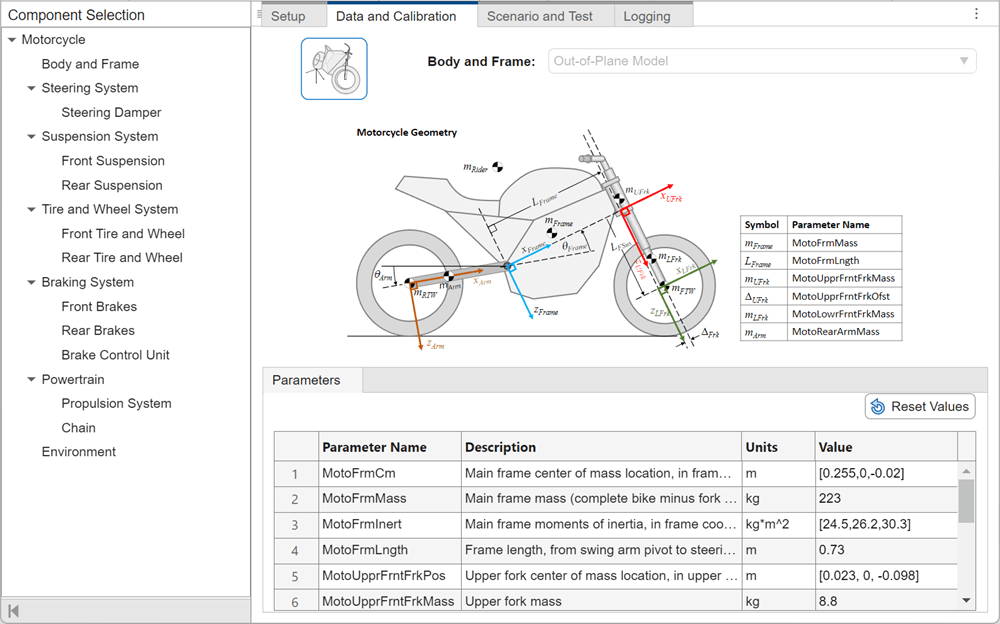
Use the Virtual Vehicle Composer to define the components in your chosen vehicle architecture. In the Data and Calibration pane, make selections for the body and frame, suspension, tires, powertrain, environment, and so forth.
The Virtual Vehicle Composer model template starts with a set of default components, as shown in the Data and Calibration pane. The component types are listed in the menu tree on the left side of the pane. You can choose and parameterize specific components on the right side.
The component options depend on the products installed and your Setup selections.
For vehicles with Vehicle class set to
Motorcycle:
Vehicle Dynamics Blockset™ is required.
Simscape™ Multibody™ is required
Model template is set to
Simscape.
Body and Frame
The Body and Frame section includes inertial and geometric properties of the fully-equipped frame, the front fork, and the rear swing arm.
These assumptions apply:
The motorcycle frame is rigid. All components mounted to the frame are rigidly attached.
The frame mass includes all components mounted to the frame.
Masses for tire and wheel assemblies, brakes, and suspensions are accounted for separately.
Steering System
If Vehicle dynamics is set to Out-of-plane
dynamics, you can choose whether to steer the front fork. Set
Steering system to Steering or
No Steering.
If Steering system is set to
Steering, then you can choose whether to include a
steering damper by setting Steering damper to
Linear damper or No Damper.
The Linear damper option introduces viscous damping about the
steering axis.
Front and Rear Suspensions
If Vehicle dynamics is set to Out-of-plane
dynamics, you can specify the suspension parameters. The only option
for Front Suspension is Linear Spring and Damper
Front. The only option for Rear Suspension
is Linear Spring and Damper Rear.
Tire and Wheel Assemblies
You select front and rear tire and wheel assemblies separately. The choices for both are similar.
With Vehicle dynamics set to In-plane
dynamics, the only Front Tire option is
Linear Tire Front, and the only Rear
Tire option is Linear Tire Rear. Here,
longitudinal force is a linear function of longitudinal slip.
With Vehicle dynamics set to Out-of-plane
dynamics, the only Front Tire option is
Linear Tire Front, and the only Rear
Tire option is Linear Tire Rear. Here,
longitudinal force is a linear function of longitudinal slip, and lateral force is a
linear function of camber angle.
Brake System
The disc option is selected for the Front
Brake Type and Rear Brake Type. The model
uses the physical parameters of the brake mechanism to calculate braking torque as a
function of brake fluid pressure.
The Open Loop Controller option is selected for the
Brake Control Unit. This option applies brake fluid
pressure based on driver command and bias settings, with no control unit.
Powertrain: Propulsion System
If Powertrain architecture is set to
Conventional Motorcycle with Chain Drive, you have two
options for Propulsion System:
Simple Engine, fueled by gasolineSI Mapped Engine, fueled by gasoline
The SI Simple Engine option is a simplified SI engine model
using a maximum torque versus engine speed table, two scalar fuel mass properties, and
one scalar engine efficiency parameter to estimate engine torque and fuel flow rate. The
SI Mapped Engine is modeled using more detailed lookup
tables for power, air mass flow, fuel flow, exhaust temperature, efficiency, and
emission performance.
If Powertrain architecture is set to Electric
Motorcycle with Chain Drive, the only option for
Propulsion System is Mapped
Motor. This model maps maximum torque as a function of motor speed,
and efficiency as a function of torque and speed. This model assumes a synchronous
permanent magnet AC motor.
Powertrain: Chain
For both powertrain architectures, Chain is set to
Chain/Belt Drive. You can define either a chain- or
belt-drive mechanism using the same parameters.
Environment
Use the Environment pane to set the ambient air, wind, and road conditions for your tests.
The app uses ambient air pressure and temperature in the ideal gas law to calculate
air density, which the app then uses to calculate aerodynamic forces. The
Engine types the app uses for the
Motorcycle are not affected by ambient conditions. Their
performance is calculated for temperature and pressure conditions of 293.15 kelvins and
101,325 pascals.