Digital Servo Control of a Hard-Disk Drive
This example shows how to use Control System Toolbox™ to design a digital servo controller for a disk drive read/write head.
For details about the system and model, see Chapter 14 of "Digital Control of Dynamic Systems," by Franklin, Powell, and Workman.
Disk Drive Model
Below is a picture of the system to be modeled.
The head-disk assembly (HDA) and actuators are modeled by a 10th-order transfer function including two rigid-body modes and the first four resonances.
The model input is the current ic driving the voice coil motor, and the output is the position error signal (PES, in % of track width). The model also includes a small delay.
Disk Drive Model:

The coupling coefficients, damping, and natural frequencies (in Hz) for the dominant flexible modes are listed below.
Model Data:




Given this data, construct a nominal model of the head assembly:
load diskdemo Gr = tf(1e6,[1 12.5 0],'outputdelay',1e-5); Gf1 = tf(w1*[a1 b1*w1],[1 2*z1*w1 w1^2]); % first resonance Gf2 = tf(w2*[a2 b2*w2],[1 2*z2*w2 w2^2]); % second resonance Gf3 = tf(w3*[a3 b3*w3],[1 2*z3*w3 w3^2]); % third resonance Gf4 = tf(w4*[a4 b4*w4],[1 2*z4*w4 w4^2]); % fourth resonance G = Gr * (ss(Gf1) + Gf2 + Gf3 + Gf4); % convert to state space for accuracy
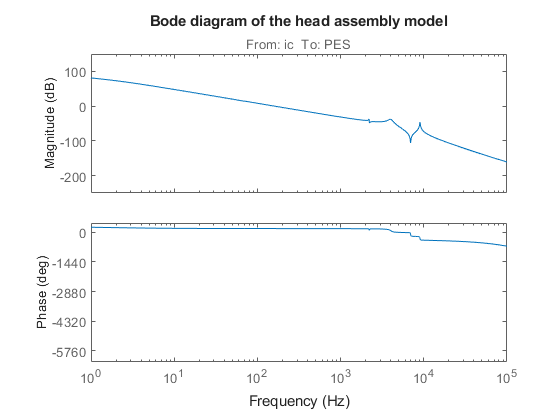
Plot the Bode response of the head assembly model:
G.InputName = 'ic'; G.OutputName = 'PES'; bp = bodeplot(G); title('Bode diagram of the head assembly model'); bp.FrequencyUnit = 'Hz'; xlim([1 1e5])
Servo Controller
Servo control is used to keep the read/write head "on track." The servo controller C(z) is digital and designed to maintain the PES (offset from the track center) close to zero.
The disturbance considered here is a step variation d in the input current ic. Your task is to design a digital compensator C(z) with adequate disturbance rejection performance.

The sample time for the digital servo is Ts = 7e-5 sec (14.2 kHz).
Realistic design specs are listed below.
Design Specs:
Open-loop gain > 20dB at 100 Hz
Bandwidth > 800 Hz
Gain margin > 10 dB
Phase margin > 45 deg
Peak closed-loop gain < 4 dB
Discretization of Model
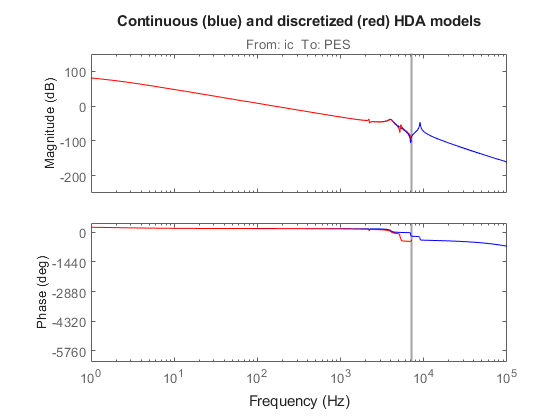
Since the servo controller is digital, you can perform the design in the discrete domain. To this effect, discretize the HDA model using C2D and the zero-order hold (ZOH) method:
Ts = 7e-5; Gd = c2d(G,Ts); bp = bodeplot(G,'b',Gd,'r'); % compare with the continuous-time model title('Continuous (blue) and discretized (red) HDA models'); bp.FrequencyUnit = 'Hz'; xlim([1 1e5])
Controller Design
Now to the compensator design. Start with a pure integrator 1/(z-1) to ensure zero steady-state error, plot the root locus of the open-loop model Gd*C, and zoom around z=1 using the Zoom In option under the Tools menu.
C = tf(1,[1 -1],Ts);
rp = rlocusplot(Gd*C);
xlim([-1.5 1.5])
ylim([-1 1])
grid on
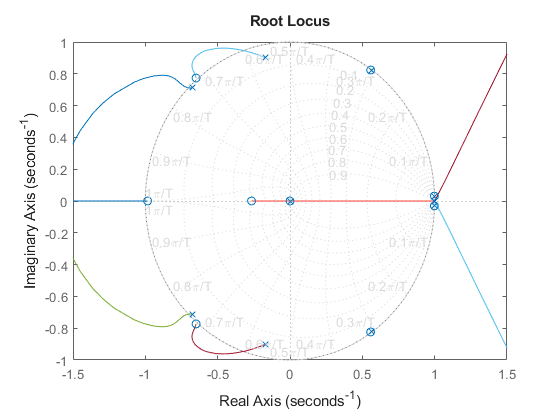
Because of the two poles at z=1, the servo loop is unstable for all positive gains. To stabilize the feedback loop, first add a pair of zeros near z=1.
C = C * zpk([.963,.963],-0.706,1,Ts);
rp = rlocusplot(Gd*C);
xlim([-1.25 1.25])
ylim([-1.2 1.2])
grid on
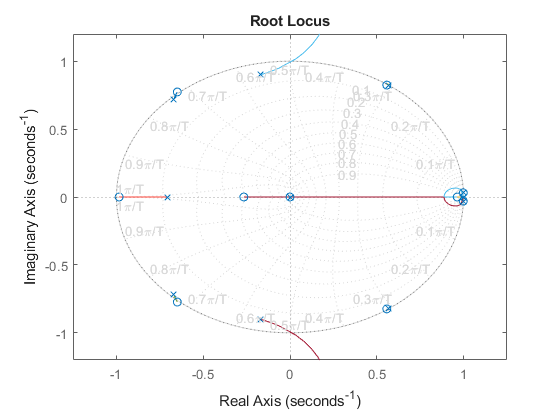
Next adjust the loop gain by clicking on the locus and dragging the black square inside the unit circle. The loop gain is displayed in the data marker. A gain of approximately 50 stabilizes the loop (set C1 = 50*C).
C1 = 50 * C;
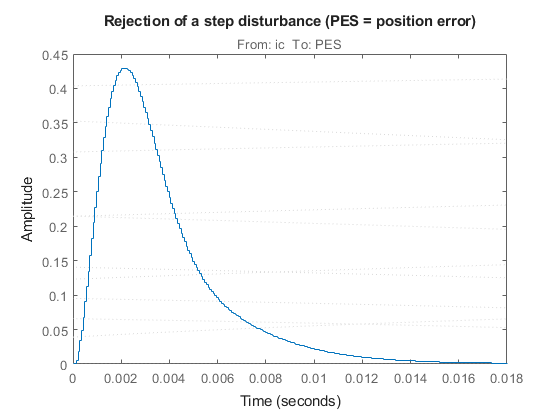
Now simulate the closed-loop response to a step disturbance in current. The disturbance is smoothly rejected, but the PES is too large (head deviates from track center by 45% of track width).
cl_step = feedback(Gd,C1);
sp = stepplot(cl_step);
title('Rejection of a step disturbance (PES = position error)')
Next look at the open-loop Bode response and the stability margins. The gain at 100 Hz is only 15 dB (vs. spec of 20 dB) and the gain margin is only 7dB, so increasing the loop gain is not an option.
margin(Gd*C1) diskdemo_aux1(1);
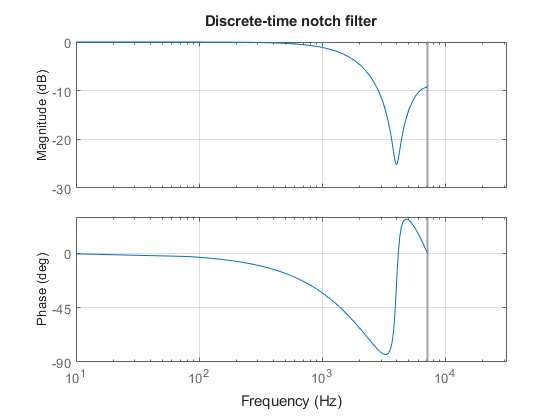
To make room for higher low-frequency gain, add a notch filter near the 4000 Hz resonance.
w0 = 4e3 * 2*pi; % notch frequency in rad/sec notch = tf([1 2*0.06*w0 w0^2],[1 2*w0 w0^2]); % continuous-time notch notchd = c2d(notch,Ts,'matched'); % discrete-time notch C2 = C1 * notchd; bp = bodeplot(notchd); title('Discrete-time notch filter'); bp.FrequencyUnit = 'Hz'; grid on
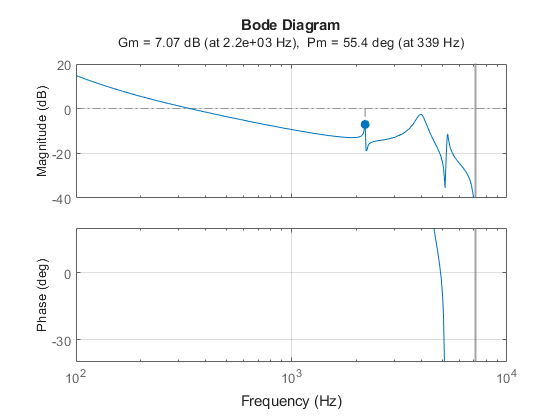
You can now safely double the loop gain. The resulting stability margins and gain at 100 Hz are within specs.
C2 = 2 * C2; margin(Gd * C2) diskdemo_aux1(2);

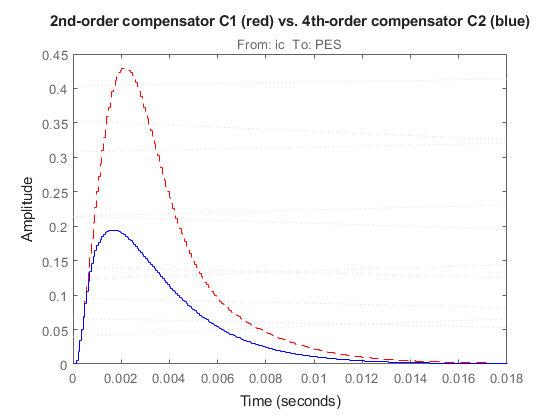
Step disturbance rejection has also greatly improved. The PES now stays below 20% of the track width.
cl_step1 = feedback(Gd,C1); cl_step2 = feedback(Gd,C2); stepplot(cl_step1,'r--',cl_step2,'b') title('2nd-order compensator C1 (red) vs. 4th-order compensator C2 (blue)')
Check if the 3dB peak gain spec on T = Gd*C/(1+Gd*C) (closed-loop sensitivity) is met:
Gd = c2d(G,Ts); Ts = 7e-5; T = feedback(Gd*C2,1); bp = bodeplot(T); bp.PhaseVisible = 'off'; bp.FrequencyUnit = 'Hz'; xlim([1e2 1e4]) title('Peak response of closed-loop sensitivity T(s)') grid on

To see the peak value, right-click on the axis and choose the Peak Response option under the Characteristics menu, then hold the mouse over the blue marker, or just click on it.
Robustness Analysis
Finally let's analyze the robustness to variations in the damping and natural frequencies of the 2nd and 3rd flexible modes.
Parameter Variations:




Generate an array of 16 models corresponding to all combinations of extremal values of z2,w2,z3,w3:
[z2,w2,z3,w3] = ndgrid([.5*z2,1.5*z2],[.9*w2,1.1*w2],[.5*z3,1.5*z3],[.8*w3,1.2*w3]); for j = 1:16, Gf21(:,:,j) = tf(w2(j)*[a2 b2*w2(j)] , [1 2*z2(j)*w2(j) w2(j)^2]); Gf31(:,:,j) = tf(w3(j)*[a3 b3*w3(j)] , [1 2*z3(j)*w3(j) w3(j)^2]); end G1 = Gr * (ss(Gf1) + Gf21 + Gf31 + Gf4);
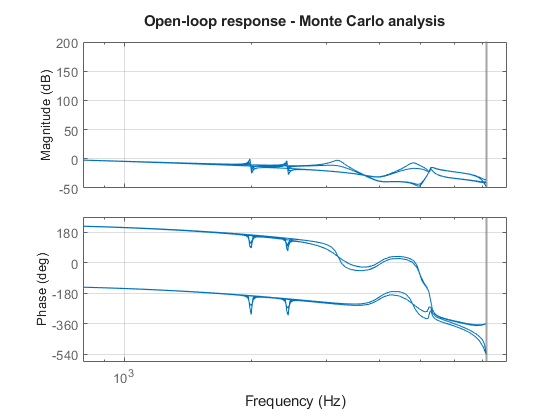
Discretize these 16 models at once and see how the parameter variations affect the open-loop response. Note: You can click on any curve to identify the underlying model.
Gd = c2d(G1,Ts); bp = bodeplot(Gd*C2); bp.FrequencyUnit = 'Hz'; bp.MagnitudeUnit = 'dB'; bp.PhaseUnit = 'deg'; xlim([8e2 8e3]) title('Open-loop response - Monte Carlo analysis') grid on
Plot the step disturbance rejection performance for these 16 models:
stepplot(feedback(Gd,C2))
title('Step disturbance rejection - Monte Carlo analysis')
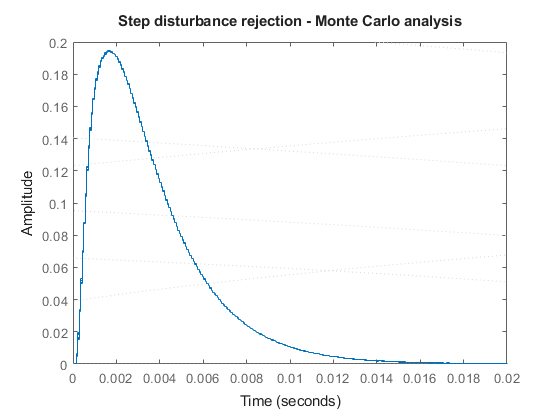
All 16 responses are nearly identical: our servo design is robust!