使用深度学习增加图像分辨率
此示例说明如何使用超深超分辨率 (VDSR) 神经网络从低分辨率图像创建高分辨率图像。
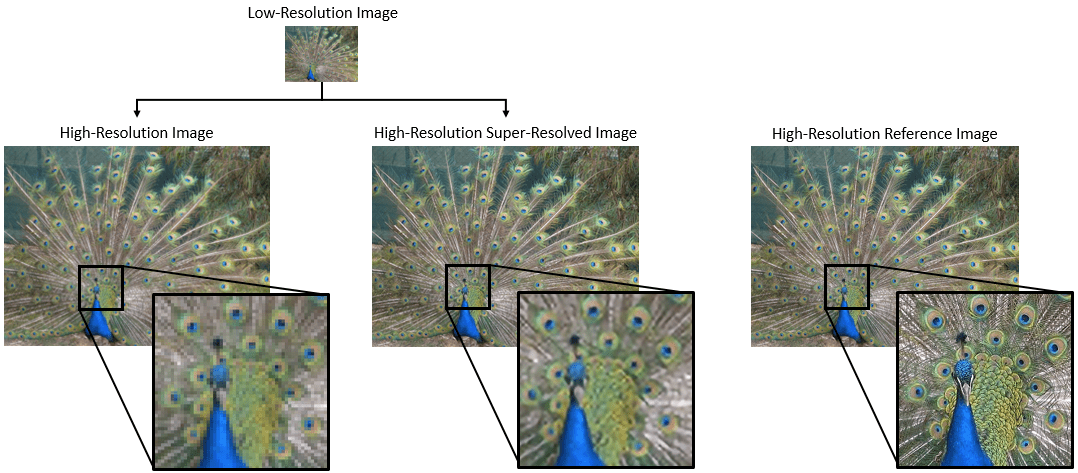
超分辨率是从低分辨率图像创建高分辨率图像的过程。此示例以单图像超分辨率 (SISR) 为例,其目标是从一个低分辨率图像中恢复一个高分辨率图像。SISR 具有挑战性,因为高频图像成分通常无法从低分辨率图像中恢复。没有高频信息,所得高分辨率图像的质量是有限的。此外,SISR 是一个不适定问题,因为一个低分辨率图像可以产生若干种可能的高分辨率图像。
目前已提出包括深度学习算法在内的几种方法来执行 SISR。此示例探索一种适用于 SISR 的深度学习算法,称为超深超分辨率 (VDSR) [1]。
VDSR 网络
VDSR 是一种用于执行单图像超分辨率 [1] 的卷积神经网络架构。VDSR 网络学习低分辨率图像和高分辨率图像之间的映射。这种映射是有可能获得的,因为低分辨率和高分辨率图像具有相似的图像成分,主要区别在于高频细节。
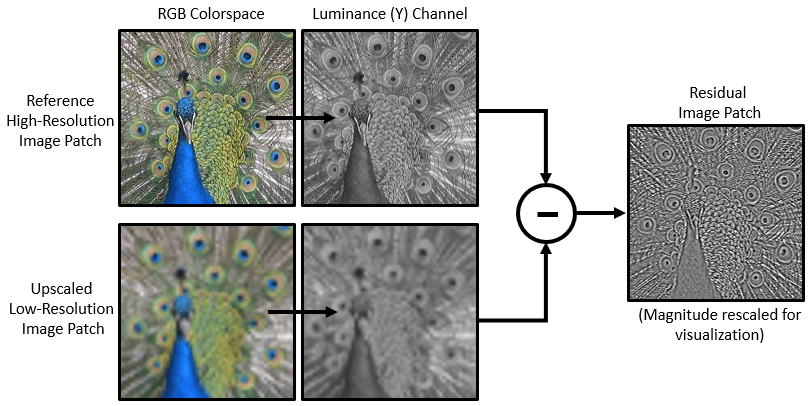
VDSR 采用一种残差学习策略,这意味着网络会学习估计残差图像。在超分辨率中,残差图像是高分辨率参考图像和低分辨率图像之间的差异,低分辨率图像已使用双三次插值扩增以匹配参考图像的大小。残差图像包含关于图像高频细节的信息。
VDSR 网络基于彩色图像的亮度检测残差图像。图像的亮度通道 Y 使用红色、绿色和蓝色像素值的线性组合来表示每个像素的亮度。另一方面,图像的两个色度通道 Cb 和 Cr 使用红色、绿色和蓝色像素值的其他线性组合来表示色差信息。VDSR 仅使用亮度通道进行训练,因为人类对亮度变化的感知比对颜色变化更敏感。
如果 是高分辨率图像的亮度, 是使用双三次插值扩增的低分辨率图像的亮度,则 VDSR 网络的输入是 ,网络学习基于训练数据预测 。
在 VDSR 网络学习估计残差图像后,您可以将估计的残差图像添加到上采样的低分辨率图像中,然后将图像转换回 RGB 颜色空间,从而重构高分辨率图像。
参考图像大小与低分辨率图像大小的关系可通过缩放因子来表示。随着缩放因子的增大,SISR 变得更加不适定,因为低分辨率图像会丢失有关高频图像成分的更多信息。VDSR 通过使用大感受野来解决此问题。此示例通过缩放增强来训练多缩放因子 VDSR 网络。缩放增强可以改进在较大缩放因子下的结果,因为网络可以利用较小缩放因子下的图像上下文。此外,VDSR 网络可以泛化至接受具有非整数缩放因子的图像。
下载训练和测试数据
下载包含 20,000 个静态自然图像的 IAPR TC-12 Benchmark [2]。该数据集包括人、动物、城市等的照片。数据文件的大小约为 1.8 GB。如果您不想下载训练数据集,则可以通过在命令行中键入 load("trainedVDSRNet.mat"); 来加载预训练的 VDSR 网络。然后,直接转至本示例中的使用 VDSR 网络执行单图像超分辨率部分。
使用辅助函数 downloadIAPRTC12Data 下载数据。此函数作为支持文件包含在本示例中。指定 dataDir 作为数据的存放位置。
dataDir =  tempdir;
downloadIAPRTC12Data(dataDir);
tempdir;
downloadIAPRTC12Data(dataDir);此示例将使用 IAPR TC-12 Benchmark 数据的一个小型子集来训练网络。加载 imageCLEF 训练数据。所有图像均为 32 位 JPEG 彩色图像。
trainImagesDir = fullfile(dataDir,"iaprtc12","images","02"); exts = [".jpg",".bmp",".png"]; pristineImages = imageDatastore(trainImagesDir,FileExtensions=exts);
列出训练图像的数量。
numel(pristineImages.Files)
ans = 616
准备训练数据
要创建训练数据集,请生成由上采样图像和对应残差图像组成的图像对。
上采样图像以 MAT 文件形式存储在磁盘的 upsampledDirName 目录中。计算出的表示网络响应的残差图像以 MAT 文件形式存储在磁盘的 residualDirName 目录中。这些 MAT 文件以 double 数据类型存储,以在训练网络时实现更高的精度。
upsampledDirName = trainImagesDir+filesep+"upsampledImages"; residualDirName = trainImagesDir+filesep+"residualImages";
使用辅助函数 createVDSRTrainingSet 预处理训练数据。此函数作为支持文件包含在本示例中。
该辅助函数对 trainImages 中的每个原始图像执行以下操作:
将图像转换为 YCbCr 颜色空间
以不同缩放因子缩小亮度 (Y) 通道,以创建低分辨率样本图像,然后使用双三次插值将图像大小调整为原始大小
计算原始图像和调整大小后的图像之间的差异。
将调整大小后的图像和残差图像保存到磁盘。
scaleFactors = [2 3 4]; createVDSRTrainingSet(pristineImages,scaleFactors,upsampledDirName,residualDirName);
定义训练集的预处理流程
在本示例中,网络输入是使用双三次插值进行上采样后的低分辨率图像。所需的网络响应是残差图像。从输入图像文件集合中创建名为 upsampledImages 的图像数据存储。从计算的残差图像文件集合中创建名为 residualImages 的图像数据存储。两个数据存储都需要使用辅助函数 matRead 从图像文件中读取图像数据。此函数作为支持文件包含在本示例中。
upsampledImages = imageDatastore(upsampledDirName,FileExtensions=".mat",ReadFcn=@matRead); residualImages = imageDatastore(residualDirName,FileExtensions=".mat",ReadFcn=@matRead);
创建指定数据增强参数的 imageDataAugmenter。在训练期间使用数据增强来更改训练数据,这可以有效地增加可用的训练数据量。此处,增强器指定 90 度的随机旋转和 x 方向上的随机翻转。
augmenter = imageDataAugmenter( ... RandRotatio=@()randi([0,1],1)*90, ... RandXReflection=true);
创建一个 randomPatchExtractionDatastore (Image Processing Toolbox) 以根据上采样图像和残差图像数据存储执行随机补片提取。补片提取是从单个较大图像中提取大量小图像补片或图块的过程。这种类型的数据增强经常用于图像到图像回归问题,其中许多网络架构可以基于非常小的输入图像大小进行训练。这意味着可以从原始训练集中的每个全大小图像中提取大量补片,这极大地增加了训练集的大小。
patchSize = [41 41];
patchesPerImage = 64;
dsTrain = randomPatchExtractionDatastore(upsampledImages,residualImages,patchSize, ...
DataAugmentation=augmenter,PatchesPerImage=patchesPerImage);生成的数据存储 dsTrain 在一轮训练的每次迭代中向网络提供小批量数据。预览从数据存储中读取的结果。
inputBatch = preview(dsTrain); disp(inputBatch)
InputImage ResponseImage
______________ ______________
{41×41 double} {41×41 double}
{41×41 double} {41×41 double}
{41×41 double} {41×41 double}
{41×41 double} {41×41 double}
{41×41 double} {41×41 double}
{41×41 double} {41×41 double}
{41×41 double} {41×41 double}
{41×41 double} {41×41 double}
设置 VDSR 层
此示例使用 Deep Learning Toolbox™ 中的 41 个单独层定义 VDSR 网络,这些层包括:
imageInputLayer- 图像输入层convolution2dLayer- 卷积神经网络的二维卷积层reluLayer- 修正线性单元 (ReLU) 层regressionLayer- 神经网络的回归输出层
第一个层,即 imageInputLayer,对图像补片进行操作。补片大小基于网络感受野,它是一个空间图像区域,影响网络中最顶层的响应。理想情况下,网络感受野与图像大小相同,这样感受野可以看到图像中的所有高级特征。在这种情况下,对于具有 D 个卷积层的网络,感受野是 (2D+1)×(2D+1)。
VDSR 有 20 个卷积层,因此感受野和图像补片大小为 41×41。图像输入层接受具有一个通道的图像,因为仅使用亮度通道训练 VDSR。
networkDepth = 20; firstLayer = imageInputLayer([41 41 1],Name="InputLayer",Normalization="none");
图像输入层后跟一个二维卷积层,其中包含 64 个大小为 3×3 的滤波器。小批量大小决定滤波器的数量。对每个卷积层的输入填零,使特征图与每次卷积后的输入始终大小相同。He 的方法 [3] 将权重初始化为随机值,以在神经元学习中引入不对称性。每个卷积层后跟一个 ReLU 层,该层在网络中引入非线性。
convLayer = convolution2dLayer(3,64,Padding=1, ... WeightsInitializer="he",BiasInitializer="zeros",Name="Conv1");
指定一个 ReLU 层。
relLayer = reluLayer(Name="ReLU1");中间各层包含 18 个交替的卷积层和修正线性单元层。每个卷积层包含 64 个大小为 3×3×64 的滤波器,每个滤波器对 64 个通道中的 3×3 空间区域进行操作。如前所述,每个卷积层都后跟一个 ReLU 层。
middleLayers = [convLayer relLayer]; for layerNumber = 2:networkDepth-1 convLayer = convolution2dLayer(3,64,Padding=[1 1], ... WeightsInitializer="he",BiasInitializer="zeros", ... Name="Conv"+num2str(layerNumber)); relLayer = reluLayer(Name="ReLU"+num2str(layerNumber)); middleLayers = [middleLayers convLayer relLayer]; end
倒数第二个层是一个卷积层,该层具有一个大小为 3×3×64 的滤波器,用于重构图像。
convLayer = convolution2dLayer(3,1,Padding=[1 1], ... WeightsInitializer="he",BiasInitializer="zeros", ... NumChannels=64,Name="Conv"+num2str(networkDepth));
最后一层是一个回归层,而不是 ReLU 层。该回归层计算残差图像和网络预测之间的均方误差。
finalLayers = [convLayer regressionLayer(Name="FinalRegressionLayer")];串联所有层以形成 VDSR 网络。
layers = [firstLayer middleLayers finalLayers];
指定训练选项
使用具有动量的随机梯度下降 (SGDM) 优化来训练网络。使用 trainingOptions 函数指定 SGDM 的超参数设置。学习率最初为 0.1,每 10 轮降低为原来的十分之一。进行 100 轮训练。
训练深度网络是很费时间的。通过指定高学习率可加快训练速度。然而,这可能会导致网络的梯度爆炸或不受控制地增长,阻碍网络训练成功。要将梯度保持在有意义的范围内,请通过将 GradientThreshold" 指定为 0.01 来启用梯度裁剪,并指定 "GradientThresholdMethod" 以使用梯度的 L2-范数。
maxEpochs = 100; epochIntervals = 1; initLearningRate = 0.1; learningRateFactor = 0.1; l2reg = 0.0001; miniBatchSize = 64; options = trainingOptions("sgdm", ... Momentum=0.9, ... InitialLearnRate=initLearningRate, ... LearnRateSchedule="piecewise", ... LearnRateDropPeriod=10, ... LearnRateDropFactor=learningRateFactor, ... L2Regularization=l2reg, ... MaxEpochs=maxEpochs, ... MiniBatchSize=miniBatchSize, ... GradientThresholdMethod="l2norm", ... GradientThreshold=0.01, ... Plots="training-progress", ... Verbose=false);
训练网络
默认情况下,该示例加载 VDSR 网络的一个预训练版本,该版本已对超分辨率图像进行缩放因子为 2、3 和 4 的训练。借助预训练网络,您无需等待训练完成,即可执行测试图像的超分辨率处理。
要训练 VDSR 网络,请将以下代码中的 doTraining 变量设置为 true。使用 trainNetwork 函数训练网络。
在 GPU 上(如果有)进行训练。使用 GPU 需要 Parallel Computing Toolbox™ 和支持 CUDA® 的 NVIDIA® GPU。有关详细信息,请参阅GPU Computing Requirements (Parallel Computing Toolbox)。在 NVIDIA Titan X 上训练大约需要 6 个小时。
doTraining =false; if doTraining net = trainNetwork(dsTrain,layers,options); modelDateTime = string(datetime("now",Format="yyyy-MM-dd-HH-mm-ss")); save("trainedVDSR-"+modelDateTime+".mat","net"); else load("trainedVDSRNet.mat"); end
使用 VDSR 网络执行单图像超分辨率
要使用 VDSR 网络执行单图像超分辨率 (SISR),请按照此示例的后续步骤进行操作:
基于高分辨率参考图像创建一个示例低分辨率图像。
使用双三次插值对该低分辨率图像执行 SISR,双三次插值是一种不依赖于深度学习的传统图像处理解决方案。
使用 VDSR 神经网络对该低分辨率图像执行 SISR。
以可视化方式比较使用双三次插值和 VDSR 重构的高分辨率图像。
量化超分辨率图像与高分辨率参考图像的相似性,以此评估前者的质量。
创建示例低分辨率图像
测试数据集 testImages 包含 Image Processing Toolbox™ 中提供的 20 个未失真图像。将图像加载到 imageDatastore 中,并以蒙太奇方式显示图像。
fileNames = ["sherlock.jpg","peacock.jpg","fabric.png","greens.jpg", ... "hands1.jpg","kobi.png","lighthouse.png","office_4.jpg", ... "onion.png","pears.png","yellowlily.jpg","indiancorn.jpg", ... "flamingos.jpg","sevilla.jpg","llama.jpg","parkavenue.jpg", ... "strawberries.jpg","trailer.jpg","wagon.jpg","football.jpg"]; filePath = fullfile(matlabroot,"toolbox","images","imdata")+filesep; filePathNames = strcat(filePath,fileNames); testImages = imageDatastore(filePathNames);
将测试图像显示为蒙太奇。
montage(testImages)

选择一个测试图像用于测试超分辨率网络。
testImage ="sherlock.jpg"; Ireference = imread(testImage); Ireference = im2double(Ireference); imshow(Ireference) title("High-Resolution Reference Image")

使用 imresize 和缩放因子 0.25 创建高分辨率参考图像的一个低分辨率版本。图像的高频分量在缩减分辨率过程中丢失。
scaleFactor = 0.25; Ilowres = imresize(Ireference,scaleFactor,"bicubic"); imshow(Ilowres) title("Low-Resolution Image")
使用双三次插值提高图像分辨率
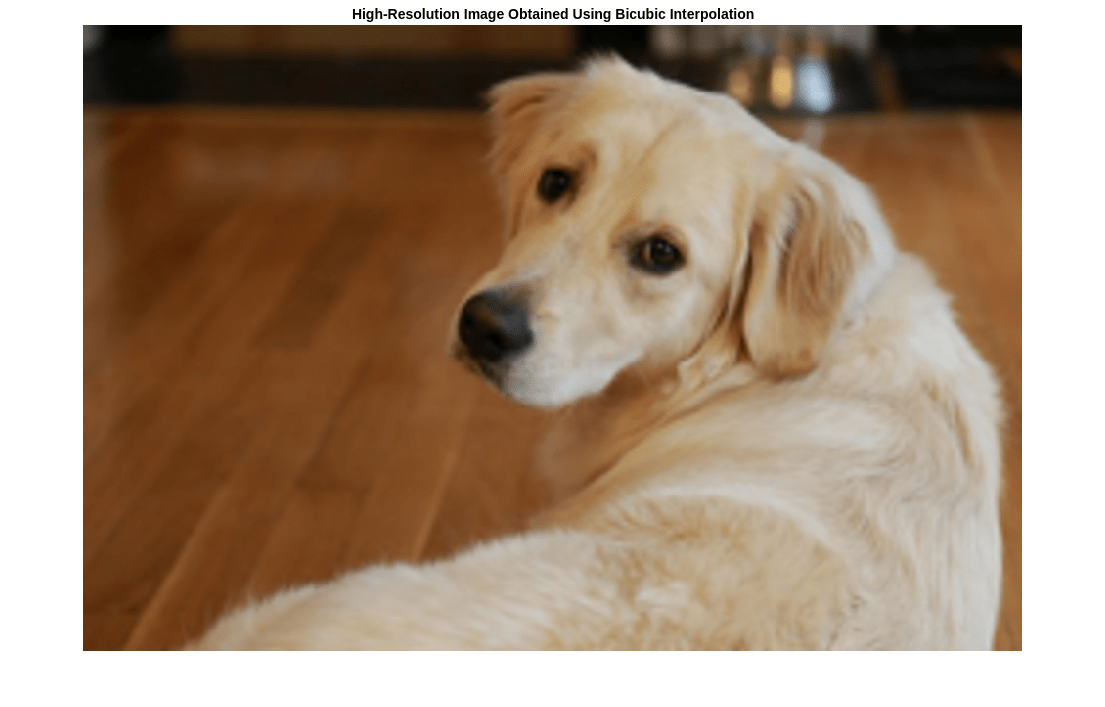
要提高图像分辨率,一种不借助于深度学习的标准方法是双三次插值。使用双三次插值扩增低分辨率图像,使所得高分辨率图像与参考图像大小相同。
[nrows,ncols,np] = size(Ireference); Ibicubic = imresize(Ilowres,[nrows ncols],"bicubic"); imshow(Ibicubic) title("High-Resolution Image Obtained Using Bicubic Interpolation")
使用预训练的 VDSR 网络提高图像分辨率
如前文所述,VDSR 只使用图像的亮度通道进行训练,因为人类对亮度变化的感知比对颜色变化更敏感。
使用 rgb2ycbcr (Image Processing Toolbox) 函数将低分辨率图像从 RGB 颜色空间转换为亮度 (Iy) 和色度(Icb 和 Icr)通道。
Iycbcr = rgb2ycbcr(Ilowres); Iy = Iycbcr(:,:,1); Icb = Iycbcr(:,:,2); Icr = Iycbcr(:,:,3);
使用双三次插值扩增亮度通道和两个色度通道。上采样的色度通道 Icb_bicubic 和 Icr_bicubic 不需要进一步处理。
Iy_bicubic = imresize(Iy,[nrows ncols],"bicubic"); Icb_bicubic = imresize(Icb,[nrows ncols],"bicubic"); Icr_bicubic = imresize(Icr,[nrows ncols],"bicubic");
对扩增的亮度分量 Iy_bicubic 应用经过训练的 VDSR 网络。观察来自最终层(回归层)的activations。网络的输出是所需的残差图像。
Iresidual = activations(net,Iy_bicubic,41);
Iresidual = double(Iresidual);
imshow(Iresidual,[])
title("Residual Image from VDSR")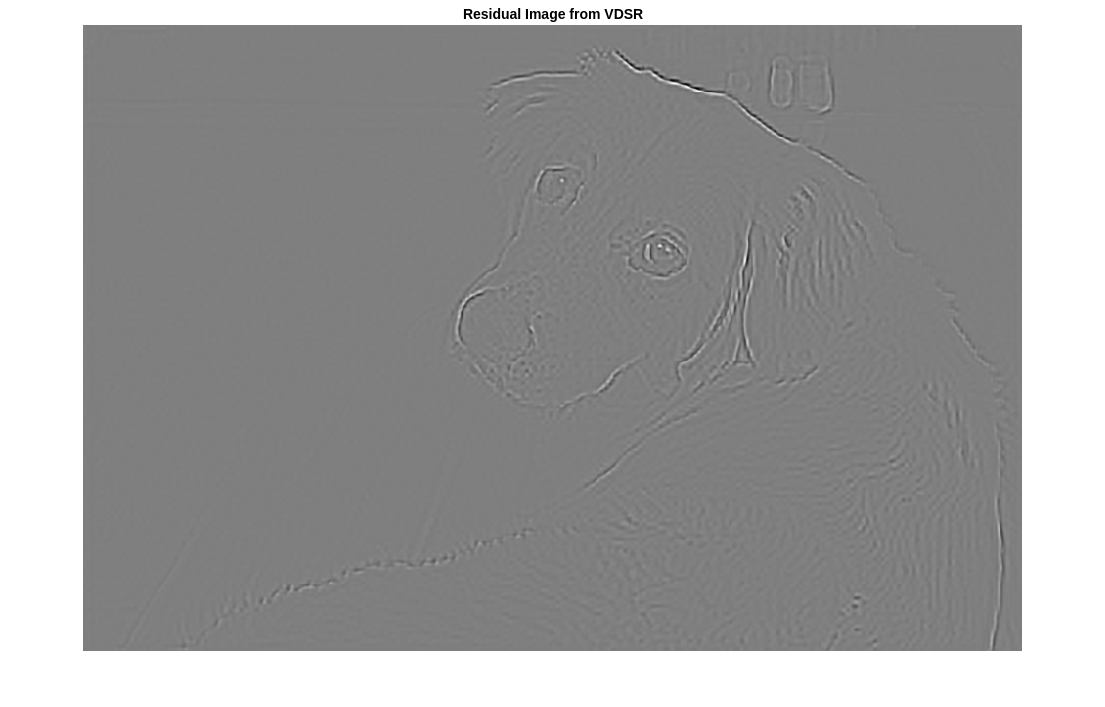
将残差图像与扩增的亮度分量相加,得到高分辨率 VDSR 亮度分量。
Isr = Iy_bicubic + Iresidual;
将高分辨率 VDSR 亮度分量与扩增的颜色分量串联起来。使用 ycbcr2rgb (Image Processing Toolbox) 函数将图像转换为 RGB 颜色空间。结果为使用 VDSR 得到的最终高分辨率彩色图像。
Ivdsr = ycbcr2rgb(cat(3,Isr,Icb_bicubic,Icr_bicubic));
imshow(Ivdsr)
title("High-Resolution Image Obtained Using VDSR")
可视化和定量比较
为了在视觉上更好地理解高分辨率图像,请检查每个图像中的一个小区域。使用向量 roi 指定感兴趣的区域 (ROI),格式为 [x y 宽度 高度]。其中的元素定义 ROI 左上角的 x 坐标和 y 坐标,以及它的宽度和高度。
roi = [360 50 400 350];
将高分辨率图像裁剪到该 ROI,并将结果显示为蒙太奇。与使用双三次插值创建的高分辨率图像相比,VDSR 图像具有更清晰的细节和更锐利的边缘。
montage({imcrop(Ibicubic,roi),imcrop(Ivdsr,roi)})
title("High-Resolution Results Using Bicubic Interpolation (Left) vs. VDSR (Right)");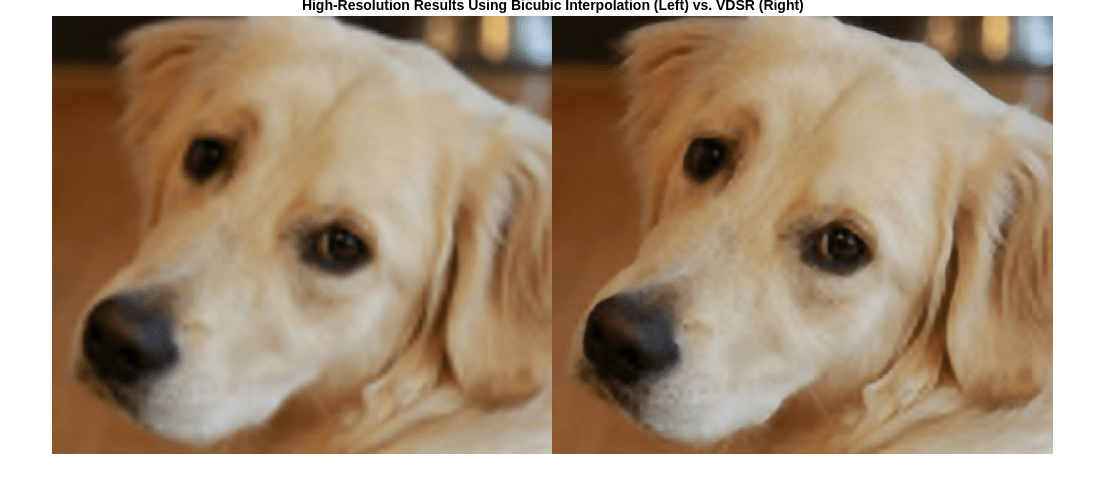
使用图像质量度量来定量比较使用双三次插值的高分辨率图像和 VDSR 图像。参考图像是准备低分辨率图像示例时所用的原始高分辨率图像 Ireference。
对照参考图像测量每个图像的峰值信噪比 (PSNR)。PSNR 值越大,通常表示图像质量越好。有关该度量的详细信息,请参阅 psnr (Image Processing Toolbox)。
bicubicPSNR = psnr(Ibicubic,Ireference)
bicubicPSNR = 38.4747
vdsrPSNR = psnr(Ivdsr,Ireference)
vdsrPSNR = 39.2346
测量每个图像的结构相似性指数 (SSIM)。SSIM 对照参考图像评估图像三个特性的视觉效果:亮度、对比度和结构。SSIM 值越接近 1,测试图像与参考图像越一致。有关该度量的详细信息,请参阅 ssim (Image Processing Toolbox)。
bicubicSSIM = ssim(Ibicubic,Ireference)
bicubicSSIM = 0.9861
vdsrSSIM = ssim(Ivdsr,Ireference)
vdsrSSIM = 0.9874
使用自然图像质量评价方法 (NIQE) 测量图像感知质量。NIQE 分数越小,表示感知质量越好。有关该度量的详细信息,请参阅 niqe (Image Processing Toolbox)。
bicubicNIQE = niqe(Ibicubic)
bicubicNIQE = 5.1721
vdsrNIQE = niqe(Ivdsr)
vdsrNIQE = 4.7612
分别计算缩放因子为 2、3 和 4 时整个测试图像集的平均 PSNR 和 SSIM。为简单起见,您可以使用辅助函数 vdsrMetrics 来计算平均度量。此函数作为支持文件包含在本示例中。
scaleFactors = [2 3 4]; vdsrMetrics(net,testImages,scaleFactors);
Results for Scale factor 2 Average PSNR for Bicubic = 31.467070 Average PSNR for VDSR = 31.481973 Average SSIM for Bicubic = 0.935820 Average SSIM for VDSR = 0.947057 Results for Scale factor 3 Average PSNR for Bicubic = 28.107057 Average PSNR for VDSR = 28.430546 Average SSIM for Bicubic = 0.883927 Average SSIM for VDSR = 0.894634 Results for Scale factor 4 Average PSNR for Bicubic = 27.066129 Average PSNR for VDSR = 27.846590 Average SSIM for Bicubic = 0.863270 Average SSIM for VDSR = 0.878101
对于每个缩放因子,VDSR 都具有比双三次插值更好的度量分数。
参考资料
[1] Kim, J., J. K. Lee, and K. M. Lee."Accurate Image Super-Resolution Using Very Deep Convolutional Networks."Proceedings of the IEEE® Conference on Computer Vision and Pattern Recognition.2016, pp. 1646-1654.
[2] Grubinger, M., P. Clough, H. Müller, and T. Deselaers."The IAPR TC-12 Benchmark:A New Evaluation Resource for Visual Information Systems."Proceedings of the OntoImage 2006 Language Resources For Content-Based Image Retrieval.Genoa, Italy.Vol. 5, May 2006, p. 10.
[3] He, K., X. Zhang, S. Ren, and J. Sun."Delving Deep into Rectifiers:Surpassing Human-Level Performance on ImageNet Classification."Proceedings of the IEEE International Conference on Computer Vision, 2015, pp. 1026-1034.
另请参阅
trainingOptions | trainNetwork | transform | combine | activations | imageDataAugmenter | imageDatastore
相关主题
- Datastores for Deep Learning
- 预处理图像以进行深度学习
- 深度学习层列表
- Increase Image Resolution Using VDSR Network Running on FPGA (Deep Learning HDL Toolbox)
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)