Digital Port Write

Libraries:
Embedded Coder Support Package for Infineon AURIX TC3x
Microcontrollers /
AURIX TC3x
Description
Add-On Required: This feature requires the Embedded Coder Support Package for Infineon AURIX TC3x Microcontrollers add-on.
Write logical status of pins of a GPIO port for the Infineon AURIX TC3x Microcontrollers.
Examples
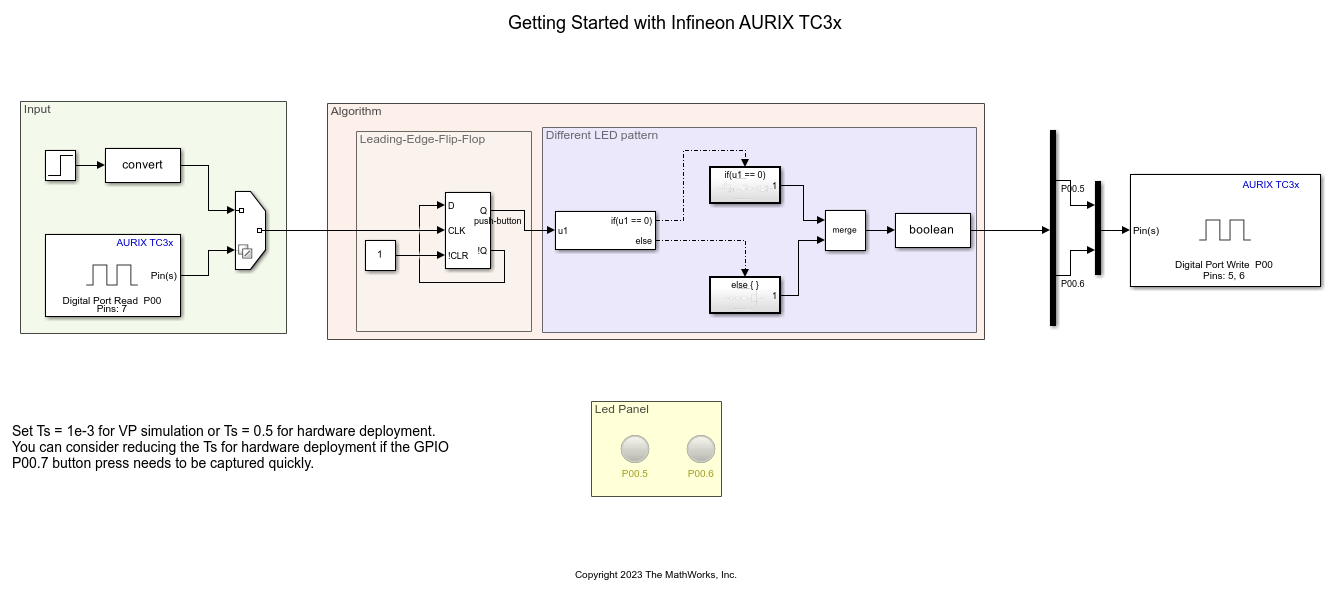
Getting Started with Embedded Coder Support Package for Infineon AURIX TC3x Microcontrollers
Use Embedded Coder® Support Package for Infineon® AURIX™ TC3x Microcontrollers to run a Simulink® model on Infineon AURIX TC3x board.

Signal Monitoring and Parameter Tuning Using Infineon AURIX TC3x Microcontrollers
Use Embedded Coder® Support Package for Infineon® AURIX™ TC3x Microcontrollers in Monitor and Tune mode (External mode) using Infineon AURIX TC3x hardware board.
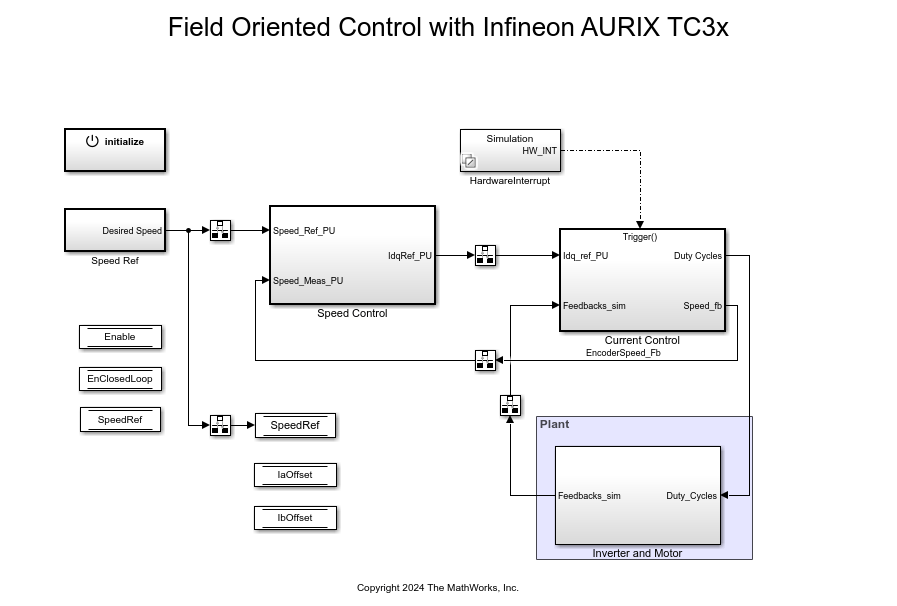
Field-Oriented Control of BLDC with Encoder Using Infineon AURIX TC3xx Microcontrollers
Implement the field-oriented control (FOC) technique to control the speed of a three-phase brushless DC (BLDC) motor. The FOC algorithm requires rotor position feedback, which is obtained by using an encoder sensor. For more details about FOC, see Field-Oriented Control (Motor Control Blockset).
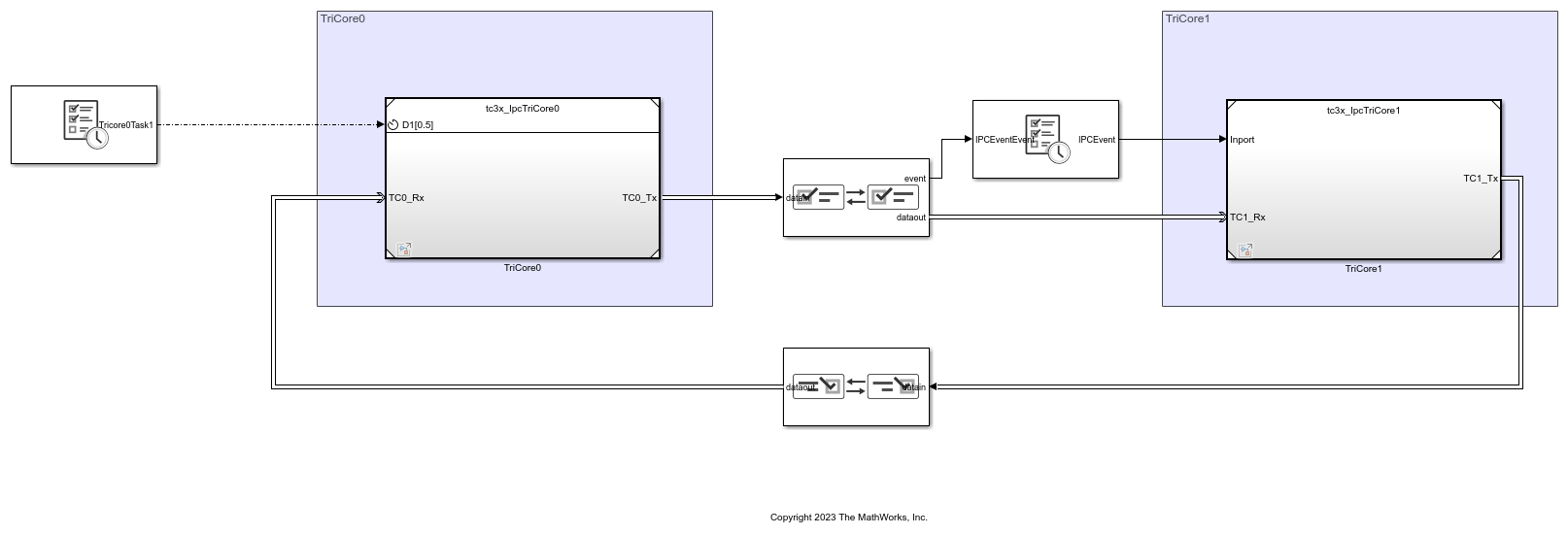
Getting Started with Multicore Modeling and Targeting for Infineon AURIX TC3x Microcontrollers
Use Embedded Coder® Support Package for Infineon® AURIX™ TC3x Microcontrollers to implement multicore modeling and communication between two cores on an Infineon® AURIX™ microcontroller. This example uses a top-level model and two referenced models for two-way multicore data communication. The model supports both simulation and code generation. You can simulate the model and deploy the code on an Infineon AURIX TC3x hardware board using the Soc Builder tool and observe the blinking of the configured LEDs of each core to verify the communication between the cores.
Ports
Input
Output
Parameters
Version History
Introduced in R2024a