Exchange Structured and Enumerated Data Between Generated and External Code
This example shows how to generate code that exchanges data with external, existing code. Construct and configure a model to match data types with the external code and to avoid duplicating type definitions and memory allocation (definition of global variables). Then, compile the generated code together with the external code into a single application.
Inspect External Code
Create the file ex_cc_algorithm.c in your
current folder.
#include "ex_cc_algorithm.h"
inSigs_T inSigs;
float_32 my_alg(void)
{
if (inSigs.err == TMP_HI) {
return 27.5;
}
else if (inSigs.err == TMP_LO) {
return inSigs.sig1 * calPrms.cal3;
}
else {
return inSigs.sig2 * calPrms.cal3;
}
}
The C code defines a global structure variable named inSigs. The code also
defines a function, my_alg, that uses inSigs
and another structure variable named calPrms.
Create the file ex_cc_algorithm.h in your
current folder.
#ifndef ex_cc_algorithm_h
#define ex_cc_algorithm_h
typedef float float_32;
typedef enum {
TMP_HI = 0,
TMP_LO,
NORM,
} err_T;
typedef struct inSigs_tag {
err_T err;
float_32 sig1;
float_32 sig2;
} inSigs_T;
typedef struct calPrms_tag {
float_32 cal1;
float_32 cal2;
float_32 cal3;
} calPrms_T;
extern calPrms_T calPrms;
extern inSigs_T inSigs;
float_32 my_alg(void);
#endif
The file defines float_32 as an alias of the C data type
float. The file also defines an enumerated data type,
err_T, and two structure types, inSigs_T
and calPrms_T.
The function my_alg is designed to calculate
a return value by using the fields of inSigs and calPrms,
which are global structure variables of the types inSigs_T and calPrms_T.
The function requires another algorithm to supply the signal data
that inSigs stores.
This code allocates memory for inSigs, but not for
calPrms. Create a model whose generated code:
Defines and initializes
calPrms.Calculates values for the fields of
inSigs.Reuses the type definitions (such as
err_Tandfloat_32) that the external code defines.
Create Simulink Model
So that you can create enumerated and structured data in the Simulink® model, first create Simulink representations of the data types that the external code defines. Store the Simulink types in a new data dictionary named
ex_cc_integ.sldd.Simulink.importExternalCTypes('ex_cc_algorithm.h',... 'DataDictionary','ex_cc_integ.sldd');
The data dictionary appears in your current folder.
To inspect the dictionary contents in the Model Explorer, in your current folder, double-click the file,
ex_cc_integ.sldd.The
Simulink.importExternalCTypesfunction createsSimulink.Bus,Simulink.AliasType, andSimulink.data.dictionary.EnumTypeDefinitionobjects that correspond to the custom C data types fromex_cc_algorithm.h.Create a new model and save it in your current folder as
ex_struct_enum_integ.Link the model to the data dictionary. On the Modeling tab, under Design, click Link to Data Dictionary.
Add algorithmic blocks that calculate the fields of
inSigs.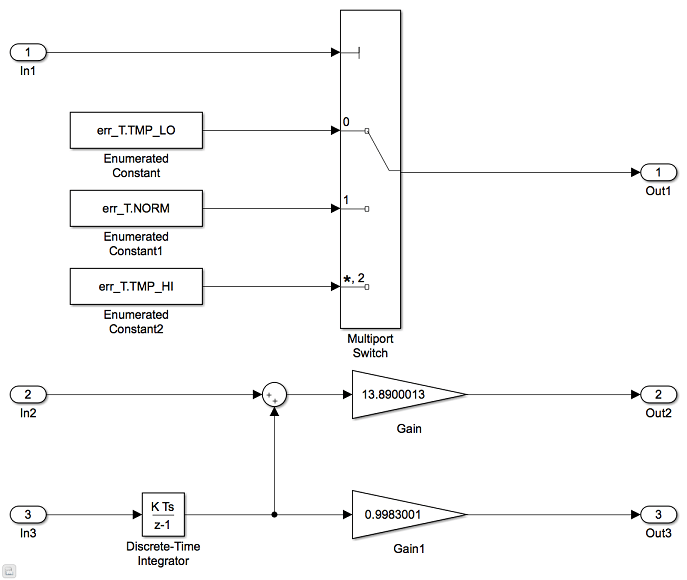
Now that you have the algorithm model, you must:
Organize the output signals into a structure variable named
inSigs.Create the structure variable
calPrms.Include
ex_cc_algorithm.cin the build process that compiles the code after code generation.
Configure Generated Code to Write Output Data to Existing Structure Variable
Add a Bus Creator block near the existing Outport blocks. The output of a Bus Creator block is a bus signal, which you can configure to appear in the generated code as a structure.
In the Bus Creator block, set these parameters:
Number of inputs to
3Output data type to
Bus: inSigs_TOutput as nonvirtual bus to selected
Delete the three existing Outport blocks (but not the signals that enter the blocks).
Connect the three remaining signal lines to the inputs of the Bus Creator block.
Add an Outport block after the Bus Creator block. Connect the output of the Bus Creator to the Outport.
In the Outport block, set the Data type parameter to
Bus: inSigs_T.On the Modeling tab, click Model Data Editor.
On the Inports/Outports tab, for the Inport blocks labeled
In2andIn3, change Data Type fromInherit: autotofloat_32.For the Outport block, set Signal Name to
inSigs.Open the Embedded Coder app. in the Apps gallery, under Code Generation, click Embedded Coder. The C Code tab opens.
Open the Code Mappings editor. Select Code Interface > Individual Element Code Mappings
On the Outports tab, select the row for the outport. Set Storage Class to
ImportFromFile.Click the
 and set Header
File to
and set Header
File to ex_cc_algorithm.h.In the model, select the output signal of the Multiport Switch block.
In the Model Data Editor, for the selected signal, set Name to
err.Set the name of the output signal of the Gain block to
sig1.Set the name of the output signal of the Gain1 block to
sig2.
When you finish, the model stores output signal data (such as
the signals err and sig1) in
the fields of a structure variable named inSigs.

Because you set Storage Class to ImportFromFile,
the generated code does not allocate memory for inSigs.
Configure Generated Code to Define Parameter Data
Configure the generated code to define the global structure variable,
calPrms, that the external code needs.
In the Model Explorer Model Hierarchy pane, under the dictionary node ex_cc_integ, select the Design Data node.
In the Contents pane, select the
Simulink.Busobject namedcalPrms_T.In the Dialog pane (the right pane), click Open Type Editor.
In the Type Editor, select
calPrms_T.In the Type Editor toolstrip, click Simulink Parameter.
In the MATLAB® Editor, copy the generated MATLAB code and run the code at the command prompt. The code creates a
Simulink.Parameterobject in the base workspace.In the Model Explorer Model Hierarchy pane, select Base Workspace.
Use the Model Explorer to move the parameter object,
calPrms_T_Param, from the base workspace to the Design Data section of the data dictionary.With the data dictionary selected, in the Contents pane, rename the parameter object as
calPrms.In the Model Data Editor, select the Parameters tab.
For the Gain block, replace the value
13.8900013withcalPrms.cal1.In the other Gain block, use
calPrms.cal2.While editing the value of the other Gain block, next to
calPrms.cal2, click the action button and select calPrms > Open.
and select calPrms > Open.In the
calPrmsproperty dialog box, next to the Value box, click the action button and select Open Variable
Editor.Use the Variable Editor to set the field values in the parameter object.
For the fields
cal1andcal2, use the numeric values that the Gain blocks in the model previously used.For
cal3, use a nonzero number such as15.2299995.
When you finish, close the Variable Editor.
In the property dialog box, set Storage class to
ExportedGlobal. Click OK.Use the Model Explorer to save the changes that you made to the dictionary.
Generate, Compile, and Inspect Code
Configure the model to include
ex_cc_algorithm.cin the build process. Set Configuration Parameters > Code Generation > Custom Code > Code information > Source files toex_cc_algorithm.c.Generate code from the model.
Inspect the generated file
ex_struct_enum_integ.c. The file defines and initializescalPrms./* Exported block parameters */ calPrms_T calPrms = { 13.8900013F, 0.998300076F, 15.23F } ; /* Variable: calPrmsThe algorithm then calculates and stores data in the fields of
inSig.
Replace Data Type Names Throughout Model
To generate code that uses float_32 instead
of the default, real32_T, instead of manually specifying
the data types of block output signals and bus elements, you can use
data type replacement (Configuration Parameters > Code Generation > Data Type Replacement). For more information, see Replace and Rename Simulink Coder Data Types to Conform to Coding Standards.