Variable-Displacement Motor (IL)
Variable-displacement motor in an isothermal liquid system

Libraries:
Simscape /
Fluids /
Isothermal Liquid /
Pumps & Motors
Description
The Variable-Displacement Motor (IL) block models a motor with variable-volume displacement. The fluid may move from port A to port B, called forward mode, or from port B to port A, called reverse mode. Motor mode operation occurs when there is a pressure drop in the direction of the flow. Pump mode operation occurs when there is a pressure gain in the direction of the flow.
The shaft rotation corresponds to the sign of the fluid volume moving through the motor, which is received as a physical signal at port D. Positive fluid displacement at D corresponds to positive shaft rotation in forward mode. Negative fluid displacement at D corresponds to negative shaft angular velocity in forward mode.
Operation Modes
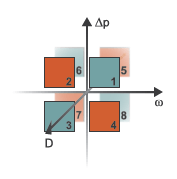
The block has eight modes of operation. The working mode depends on the pressure drop from port A to port B, Δp = pA – pB; the angular velocity, ω = ωR – ωC; and the fluid volumetric displacement at port D. The figure above maps these modes to the octants of a Δp-ω-D chart:
Mode 1, Forward Motor: Flow from port A to port B causes a pressure decrease from A to B and a positive shaft angular velocity.
Mode 2, Reverse Pump: Negative shaft angular velocity causes a pressure increase from port B to port A and flow from B to port A.
Mode 3, Reverse Motor: Flow from port B to port A causes a pressure decrease from B to A and a negative shaft angular velocity.
Mode 4, Forward Pump: Positive shaft angular velocity causes a pressure increase from port A to port B and flow from A to B.
Mode 5, Reverse Pump: Positive shaft angular velocity causes a pressure increase from port B to port A and flow from B to A.
Mode 6, Forward Motor: Flow from port A to port B causes a pressure decrease from A to B and a positive shaft angular velocity.
Mode 7, Forward Pump: Negative shaft angular velocity causes a pressure increase from port A to port B and flow from A to B.
Mode 8, Reverse Motor: Flow from B to A causes a pressure decrease from B to A and positive shaft angular velocity.
The motor block has analytical, lookup table, and physical signal parameterizations. When using tabulated data or an input signal for parameterization, you can choose to characterize the motor operation based on efficiency or losses.
The threshold parameters Pressure drop threshold for motor-pump transition, Angular velocity threshold for motor-pump transition, and Displacement threshold for motor-pump transition identify regions where numerically smoothed flow transition between the motor operational modes can occur. For the pressure and angular velocity thresholds, choose a transition region that provides some margin for the transition term, but which is small enough relative to the typical motor pressure drop and angular velocity so that it will not impact calculation results. For the displacement threshold, choose a threshold value that is smaller than the typical displacement volume during normal operation.
Analytical Leakage and Friction Parameterization
If you set Leakage and friction parameterization to
Analytical, the block calculates internal leakage and
shaft friction from constant nominal values of shaft velocity, pressure drop,
volumetric displacement, and torque. The leakage flow rate, which is correlated with
the pressure differential over the motor, is calculated as:
where:
Δp is pA – pB.
ρavg is the average fluid density.
K is the Hagen-Poiseuille coefficient for analytical loss,
where:
Dnom is the Nominal displacement.
ωnom is the Nominal shaft angular velocity.
ηnom is the Volumetric efficiency at nominal conditions.
Δpnom is the Nominal pressure drop.
The torque, which is related to the motor pressure differential, is calculated as:
where:
τ0 is the No-load torque.
k is the friction torque vs. pressure gain coefficient at nominal displacement, which is determined from the Mechanical efficiency at nominal conditions, ηm,nom:
τfr,nom is the friction torque at nominal conditions:
Δp is the pressure drop between ports A and B.
ω is the relative shaft angular velocity, or .
Tabulated Data Parameterizations
When using tabulated data for motor efficiencies or losses, you can provide data for one or more of the motor operational modes. The signs of the tabulated data determine the operational regime of the block. When data is provided for less than eight operational modes, the block calculates the complementing data for the other mode(s) by extending the given data into the remaining octants.
Tabulated data - volumetric and mechanical
efficiencies parameterizationThe leakage flow rate is calculated as:
where:
and ηv is the volumetric efficiency, which is interpolated from the user-provided tabulated data. The transition term, α, is
where:
Δp is pA – pB.
Δpthreshold is the Pressure drop threshold for motor-pump transition.
ω is ωR – ωC.
ωthreshold is the Angular velocity threshold for motor-pump transition.
The torque is calculated as:
where:
and ηm is the mechanical efficiency, which is interpolated from the user-provided tabulated data.
Tabulated data - volumetric and mechanical
losses parameterizationThe leakage flow rate is calculated as:
where qloss is interpolated from the Volumetric loss table, q_loss(dp,w,D) parameter, which is based on user-supplied data for pressure drop, shaft angular velocity, and fluid volumetric displacement.
The shaft friction torque is calculated as:
where τloss is interpolated from the Mechanical loss table, torque_loss(dp,w,D) parameter, which is based on user-supplied data for pressure drop, shaft angular velocity, and fluid volumetric displacement.
Input Signal Parameterization
When Leakage and friction parameterization is set
toInput signal - volumetric and mechanical
efficiencies, ports EV and
EM are enabled. The internal leakage and shaft friction are
calculated in the same way as the Tabulated data - volumetric and
mechanical efficiencies parameterization, except that
ηv and
ηm are received directly at ports
EV and EM, respectively.
When Leakage and friction parameterization is set
toInput signal - volumetric and mechanical losses,
ports LV and LM are enabled. These ports
receive leakage flow and friction torque as positive physical signals. The leakage
flow rate is calculated as:
where:
qLV is the leakage flow received at port LV.
pthresh is the Pressure drop threshold for motor-pump transition parameter.
The friction torque is calculated as:
where
τLM is the friction torque received at port LM.
ωthresh is the Angular velocity threshold for motor-pump transition parameter.
The volumetric and mechanical efficiencies range between the user-defined specified minimum and maximum values. Any values lower or higher than this range will take on the minimum and maximum specified values, respectively.
Motor Operation
The motor flow rate is:
where
The motor torque is:
where
The mechanical power extracted by the motor shaft is:
and the motor hydraulic power is:
To be notified if the block is operating beyond the supplied
tabulated data, you can set Check if operating beyond the range of
supplied tabulated data to Warning to
receive a warning if this occurs, or Error to stop the
simulation when this occurs. When using input signal for volumetric or mechanical
losses, you can be notified if the simulation surpasses operating modes with the
Check if operating beyond motor mode parameter.
You can also monitor motor functionality. Set Check if pressures are
less than motor minimum pressure to
Warning to receive a warning if this occurs, or
Error to stop the simulation when this occurs.