使用零点/极点/增益参数估计模型
本示例演示了如何对由极点、零点和增益参数化的一款模型进行估计。该示例需要使用 Control System Toolbox™ 软件。
您使用复共轭零极点对对模型进行参数化。当您使用复共轭参数对对实数灰盒模型进行参数化时,软件会更新参数值,使得估计值也是复共轭参数对。
加载测量数据。
load zpkestdata zd;
包含测量数据的变量 zd 被加载到 MATLAB® 工作区中。
plot(zd);

输出结果显示输入延迟约为 3.14 秒。
使用 zpkestODE 函数,以零极点增益 (zpk) 形式对模型进行估计。要查看此函数,请输入
type zpkestODEfunction [a,b,c,d] = zpkestODE(z,p,k,Ts,varargin) %zpkestODE ODE file that parameterizes a state-space model using poles and %zeros as its parameters. % % Requires Control System Toolbox. % Copyright 2011 The MathWorks, Inc. sysc = zpk(z,p,k); if Ts==0 [a,b,c,d] = ssdata(sysc); else [a,b,c,d] = ssdata(c2d(sysc,Ts,'foh')); end
创建一个与 ODE 函数相关的线性灰盒模型。
假设该模型有五个极点和四个零点。假设其中两个极点和两个零点是复共轭对。
z = [-0.5+1i, -0.5-1i, -0.5, -1];
p = [-1.11+2i, -1.11-2i, -3.01, -4.01, -0.02];
k = 10.1;
parameters = {z,p,k};
Ts = 0;
odefun = @zpkestODE;
init_sys = idgrey(odefun,parameters,'cd',{},Ts,'InputDelay',3.14);z、p 和 k 是模型参数的初始猜测值。
init_sys 是一个 idgrey 模型,与 zpkestODE.m 函数相关联。'cd' 标志表示 ODE 函数 zpkestODE 会根据采样周期返回连续或离散模型。
评估初始模型的拟合质量。
compareOpt = compareOptions('InitialCondition','zero'); compare(zd,init_sys,compareOpt); legend(Interpreter="none")
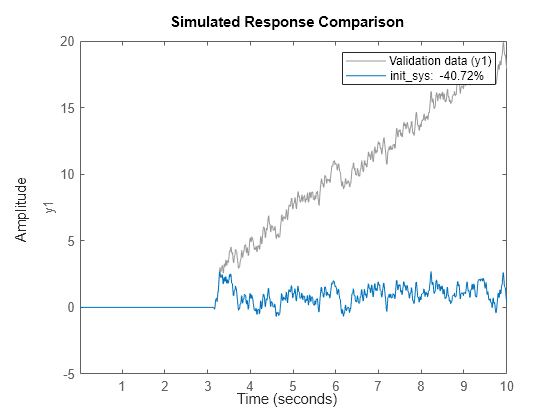
初始模型的拟合效果不佳。
指定估计选项。
opt = greyestOptions('InitialState','zero','DisturbanceModel','none','SearchMethod','gna');
估计模型。
sys = greyest(zd,init_sys,opt);
sys 是一个 idgrey 模型,其中包含估计得到的零点-极点-增益模型参数。
比较估计值与初始参数值。
[getpvec(init_sys) getpvec(sys)]
ans = 10×2 complex
-0.5000 + 1.0000i -1.6158 + 1.6173i
-0.5000 - 1.0000i -1.6158 - 1.6173i
-0.5000 + 0.0000i -0.9417 + 0.0000i
-1.0000 + 0.0000i -1.4099 + 0.0000i
-1.1100 + 2.0000i -2.4050 + 1.4340i
-1.1100 - 2.0000i -2.4050 - 1.4340i
-3.0100 + 0.0000i -2.3387 + 0.0000i
-4.0100 + 0.0000i -2.3392 + 0.0000i
-0.0200 + 0.0000i -0.0082 + 0.0000i
10.1000 + 0.0000i 9.7881 + 0.0000i
getpvec 命令返回模型的参数值。在上面的输出中,每一行都显示了相应的初始参数值和估计参数值。所有最初被指定为复共轭对的参数,在估计后仍保持这种形式。
评估估计模型所提供的拟合质量。
compare(zd,init_sys,sys,compareOpt);
legend(Interpreter="none")
sys 与测量数据的吻合度更高 (98.35%)。
另请参阅
idgrey | greyest | getpvec | ssdata | c2d