gpsdev
Connect to GPS receiver on Arduino hardware
Description
Add-On Required: This feature requires the MATLAB Support Package for Arduino Hardware add-on.
The gpsdev object reads position and time data using a Global Positioning
System(GPS) module. The gpsdev object represents a connection to the GPS
receiver connected to the serial port of the Arduino® hardware. gpsdev uses GPRMC, GPGGA and GPGSA sentences to
read the data. The GPS receiver must output these sentences for successful creation of the
gpsdev object. Ensure your GPS module is configured to give the
sentences.
Creation
Description
gpsObj = gpsdev(a)a.
gpsObj = gpsdev(___,Name,Value)
Input Arguments
Name-Value Arguments
Properties
Unless otherwise indicated, properties are nontunable, which means you cannot change their
values after calling the object. Objects lock when you call them, and the
release function unlocks them.
If a property is tunable, you can change its value at any time.
For more information on changing property values, see System Design in MATLAB Using System Objects.
This property is read-only.
The baud rate for serial communication. The baud rate is set at 9600 bits/sec. The
GPS receiver must be configured to work at 9600 bits/sec. If your GPS receiver is
configured to some other baud rate, reconfigure it to 9600 bits/sec to use
gpsdev function.
Number of samples read from the GPS in a single execution of the
read function. The maximum value is 10.
Tunable: No
Data Types: double
Specify whether to return the latest or the oldest data samples. The number of
samples depends on the SamplesPerRead value. The data read from the
GPS receiver is stored in the MATLAB® buffer.
latest—Provides the latest data samples available in the buffer. All previous data samples in the buffer are discarded. For example, if
SamplesPerRead= 3, the latest three data samples read by the GPS receiver are returned.The following figure illustrates how latest data samples are returned assuming S1 is the first GPS receiver data stored in the buffer, S2 is the second data and so on and Sn is the last data stored in the buffer and
SamplesPerReadproperty is set to 3 during GPS receiver object creation.
oldest—Provides the oldest data samples available in the buffer. In this case, no data samples are discarded. For example, if
SamplesPerRead= 3, the first three data samples read are returned for the first read, the next three data samples are returned for the second read, and so on.The following figure illustrates how oldest data samples are returned assuming S1 is the first GPS receiver data stored in the buffer, S2 is the second data and so on and Sn is the last data stored in the buffer and
SamplesPerReadproperty is set to 3 during GPS receiver object creation.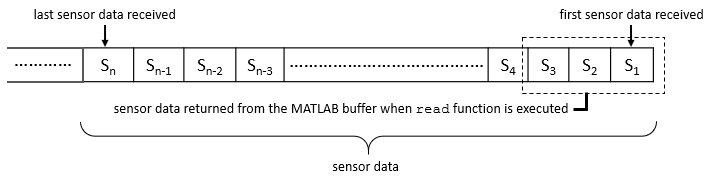
Tunable: No
Data Types: character vector | string
This property is read-only.
Samples read from the first read. When you
release the object, SamplesRead is set to
0.
Data Types: double
This property is read-only.
Samples available in the host buffer. When you release the
object, SamplesAvailable is set to 0.
The SamplesAvailable property is updated only when you invoke the
read() function, which refreshes the data buffers in the
background.
Data Types: double
Set the output format of the data returned by executing the
read function.
When the OutputFormat is set to timetable,
the timetable returned has the following fields:
LLA (Latitude, Longitude, Altitude)
Ground Speed
Course over ground
Dilution of Precisions(DOPs), VDOP,HDOP,PDOP,
GPS Receiver Time
Time — Time stamps read from the Arduino hardware in
datetimeordurationformat
When the OutputFormat is set to matrix, the
data is returned as matrices of Time, LLA, Ground Speed, Course over ground, DOPs, and
GPS receiver time. The units for the GPS receiver readings are the same as the
timetable format.
Tunable: Yes
Data Types: character vector | string
Set the format of the time displayed when the GPS data is read.
datetime— Displays the date and time at which the data is read.duration— Displays the time elapsed in seconds after the GPS object is locked. The GPS object gets locked at the first call of thereadfunction either after the object creation or after the execution of thereleasefunction.
Tunable: Yes
Data Types: character vector | string
Usage
Create GPS Connection
Create an Arduino object and include the Serial library.
a = arduino('COM4', 'Mega2560', 'Libraries', 'Serial');
Create the GPS object.
gpsObj = gpsdev(a)
gpsObj =
gpsdev with properties:
SerialPort: 1
BaudRate: 9600 (bits/s)
SamplesPerRead: 2
ReadMode: 'oldest'
SamplesRead: 0
SamplesAvailable: 0
Show all properties, functions
Create GPS Connection with Additional Name-Value Pair Arguments
Create a GPS object with additional properties specified as name-value pair arguments.
gpsObj = gpsdev(a,'SamplesPerRead',3,'ReadMode','latest')
gpsObj =
gpsdev with properties:
SerialPort: 1
BaudRate: 9600 (bits/s)
SamplesPerRead: 3
ReadMode: 'latest'
SamplesRead: 0
SamplesAvailable: 0
Object Functions
More About
Version History
Introduced in R2020a