开环和闭环电机控制方法
本节介绍开环和闭环电机控制方法、这些方法之间的区别及其实际应用。
在开环控制(也称为标量控制或伏特/赫兹控制)中,控制器在没有使用来自其输出的任何反馈的情况下运行 AC 电机。在闭环控制中,控制器通过实时调整控制信号来监控电机的实际转速、转矩和位置。每种方法都有优点和缺点,使其适用于特定应用。
开环电机控制
开环控制使用输入参考机械转速来确定参考定子电压频率 (fref) 和参考定子电压幅值 (Vref)。由于此方法不使用任何反馈,因此它无法对控制输入进行任何实时调整。
该方法并不从被控对象获取实时的电机机械位置反馈,而是处理控制输入以确定电机电气位置。然后,系统使用此位置和参考电压值来生成电机相电压。
在不考虑动态响应且需要高性价比解决方案的应用中,可以使用开环控制。开环电机控制无法将可能影响电机转速的外部条件纳入考虑范围。因此,开环控制系统无法自动校正期望电机转速与实际电机转速之间的偏差。
上图显示的是一个开环控制系统。电源电路包含一个由 DC 电源供电的 PWM 电压馈电逆变器。该系统不使用任何反馈信号来实现控制。它使用参考转速来确定定子电压的频率。

系统计算的电压幅值与额定电压和额定频率之比(通常称为伏特/赫兹比)成正比,因此磁通保持恒定。对于 AC 电机:
其中:
是电机的额定磁通,单位为韦伯。
是 AC 电机的定子电压,单位为伏特。
是 AC 电机定子电压和电流的频率,单位为赫兹。
在开环系统中,AC 电机的转速表示为:
其中:
是 AC 电机的机械转速,单位为 rpm。
是电机的极对数。
然后由以下方程确定达到所需参考转速值 fref(对于给定电机)所需的参考电压频率 RPMref。
通过保持与电机额定磁通相等的恒定磁通,系统保持额定电压与额定频率的常数比:
系统使用此常数比基于参考电压频率 (fref) 计算 PWM 参考电压的峰值振幅 (Vref)。
开环系统使用 fref 和 Vref 以及计算出的电机电气位置来生成逆变器的 PWM 占空比。
通过保持三相电压波形的参考定子电压 Vref 与参考频率 fref 的比率恒定,系统保持定子磁通相对恒定。然而,如下图所示,V/F 比并非在整个电机转速范围内保持恒定。
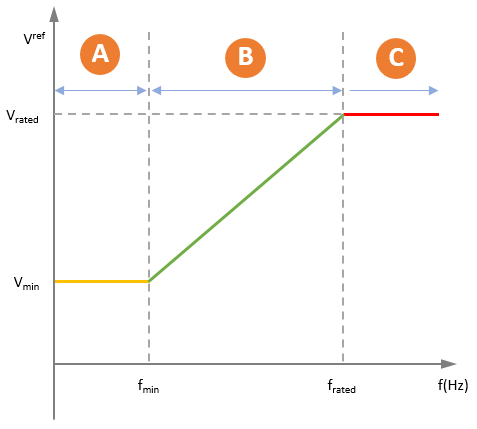
区域 A - 在低速时,系统需要最小升压电压(额定电压的 15% 或 25%)来克服定子电阻压降的影响。电压 Vmin 可以补偿此下降。
区域 B - 在此区域中,系统保持 Vrated / frated 比恒定。它通过根据 fref 计算 Vref 来遵循 V/F 控制原则。
区域 C - 在较高转速下,系统无法保持恒定的 V/F 比,因为定子电压的限值为 Vrated。在此区域中,Vref 一直等于 Vrated,即使 fref 有所增加也是如此。
在额定磁通下运行电机有助于避免电机过热,并通过平衡生成的转矩和消耗的功率来提高电机效率。除了简化控制算法之外,使用额定磁通还可以使电机行为更可预测。
开环控制系统不会评估或校正被控对象输出以应对影响电机转速的内部和外部扰动,例如电机负载的变化。因此,系统无法自动校正期望的电机转速和实际电机转速之间的偏差。
使用标幺制表示时,开环控制系统将 Vrated 视为基量,通常对应于 1PU 或 100% 占空比。(使用正弦脉冲宽度调制 (PWM) 而不是空间矢量 PWM 需要额外的 增益。)有关详细信息,请参阅 标幺制。
有关说明如何使用开环控制运行三相电机的示例,请参阅以开环控制方式运行三相 AC 电机并校准 ADC 偏移量。
注意
此处描述的开环控制实现不会补偿由于定子电阻和弱磁引起的压降。
闭环电机控制
闭环控制使用来自电机的实时反馈(例如电流和机械位置)来比较参考输入和实际输出(转速、转矩或位置)。然后,它对参考电压和占空比进行必要的修正以最小化任何误差,从而使电机输出匹配参考输入。
使用实时被控对象反馈,闭环系统可以精确控制电机转速、位置或转矩。与开环控制不同,闭环系统会自动补偿内部和外部扰动,例如电机负载的变化。您可以使用控制参数(控制器增益)来调节和优化控制系统的响应性、准确度和稳定性。
在精度、自适应和效率至关重要的应用中使用闭环控制,例如在机器人、无人机、电动汽车和工业自动化系统中。
闭环电机控制系统的关键组件包括:
电机 - 系统通过控制转速、转矩和位置等特性来运行的电机或作动器,例如永磁同步电机 (PMSM) 或 AC 感应电机 (ACIM)。
传感器 - 能够测量实际电机输出的设备,例如位置和电流传感器。像正交编码器、旋转变压器和霍尔效应传感器这样的位置传感器测量实时转子机械位置。模数转换器 (ADC) 测量电机相电流并提供其等效数字计数值。
控制器 - 处理传感器输出、将其与控制输入进行比较并调整生成电机相电压的控制信号的设备或算法。
逆变器或驱动 - 将来自控制器的控制信号转换为驱动电机的三相电压的设备。
任何闭环电机控制方法通常都按以下步骤循环执行:
设置设定点 - 设置期望的转速、转矩或位置作为设定点或控制输入。
测量反馈 - 使用传感器或无传感器算法测量被控对象反馈,包括电机位置和相电流。
比较 - 将被控对象反馈与控制系统设定点进行比较,并计算差值或误差值。
修正 - 使用差值或误差来计算并应用对控制信号的必要调整。
作动 - 使用调整后的控制信号修改相电压,以使被控对象输出匹配设定点。
矢量控制
矢量控制(或 d-q 电流控制)是一种用于控制三相 AC 电机的常见闭环电流控制方法。该方法首先使用克拉克变换将三相电流转换为 α-β 静止参考系。然后,它使用帕克变换将电流转换为旋转的 d-q 参考系,在此坐标系中电流由 DC 信号表示。下图说明三个坐标系中归一化的时域相电流。
由于使用更高的增益来减少稳态误差的能力有限,使用 PI 控制器直接控制电机相 AC 电流会导致跟踪响应延迟。
然而,使用电机相电流和电压的 d-q 等效量可以提高 PI 控制器的控制效率和性能。由于积分控制会产生最小的稳态误差和非常高的 DC 增益,因此 PI 控制器在控制 DC 信号时效率非常高。
矢量控制策略通过使用 PI 控制器控制 d-q 轴电流(控制输入)并生成具有零稳态误差的 d-q 轴电压输出(控制信号)来实现这种效率。然后,该算法使用数学变换将这些电压转换为逆变器的占空比,逆变器通过使用对应的三相电压来驱动电机。
矢量控制算法确保旋转的 d-q 参考系与三相定子电压同步,使得两者具有相同的频率和位置。
下图显示矢量控制的一般原理。
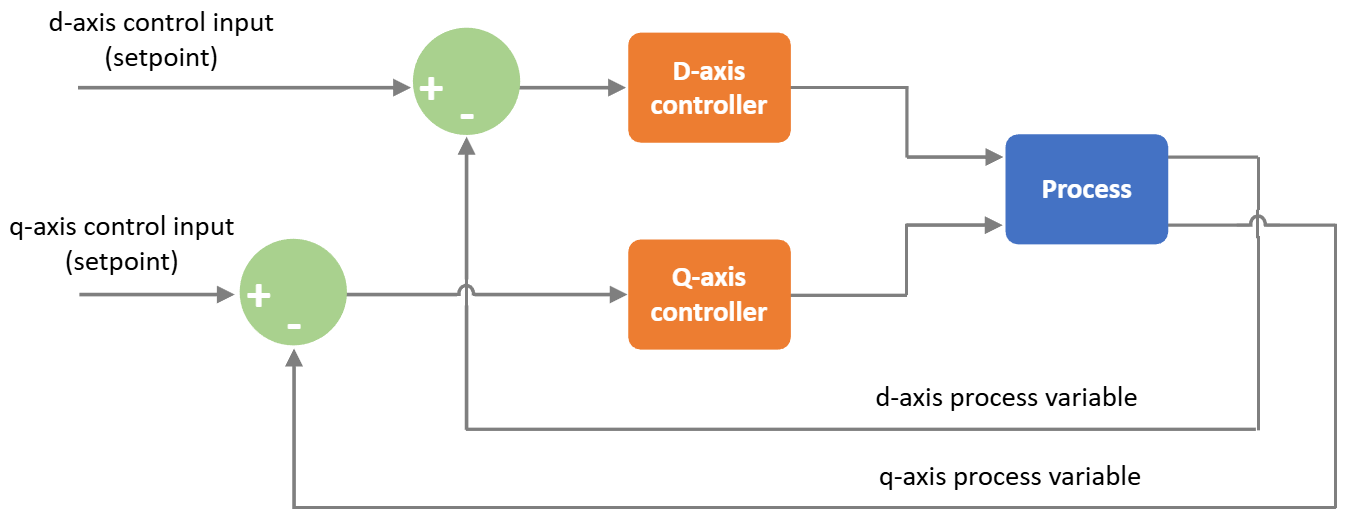
下图显示实现矢量控制的一种建模方法:
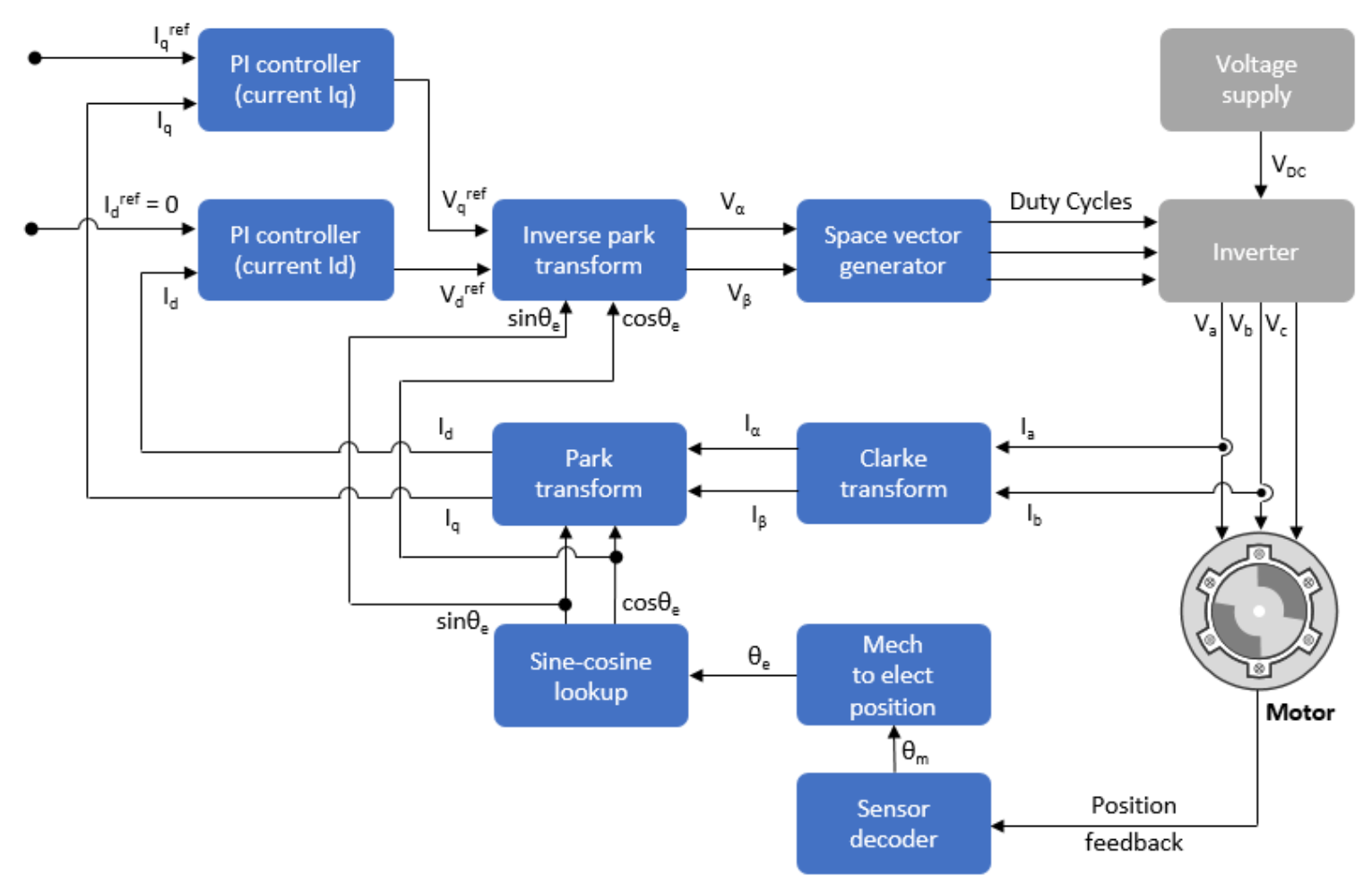
该算法使用两个 PI 控制器独立控制 d 轴和 q 轴电流。这些 PI 控制器提供 d-q 轴电压作为控制信号。然后,该算法使用帕克逆变换将这些电压转换为其在静止正交参考系中的 α 轴和 β 轴等效量。FOC 通过调制方法(例如 PWM 调制)利用这些电压生成占空比来驱动逆变器。
将电流变换到 d-q 轴需要转子机械位置反馈,您可以使用位置传感器或无传感器位置估计器获得转子机械位置反馈。
在您的算法中,您可以使用采样延迟对电流测量期间的滞后进行建模。同样,您可以使用延迟对执行控制算法所需的计算时间进行建模。
为了获得准确的结果,您必须适当地调节 PI 控制器增益。有关 Motor Control Blockset™ 为调节控制器增益提供的解决方案的更多详细信息,请参阅增益计算和调节。
开环到闭环转换
某些应用要求您使用开环控制启动电机。一旦电机在开环控制中达到要求的最低稳定性,控制系统就转换为闭环控制。
在基于正交编码器的位置感测系统中,电机以开环控制方式启动,一旦检测到索引脉冲就转换为闭环控制方式。有关详细信息,请参阅Simulate Calculation of Rotor Position Using Quadrature Decoder Block。
在无传感器的位置控制中,电机以开环配置基转速的 10% 开始运行。参考开关超出基本转速的 10% 后,控制系统从开环转换为闭环控制。为了确保从开环到闭环控制的平稳转换,PI 控制器会重置并从与开环输出相同的初始条件开始。有关将永磁同步电机 (PMSM) 的无传感器位置控制从开环切换到闭环的更多信息,请参阅PMSM 的无传感器磁场定向控制。