Induction Motor
三相感应电机
库:
Powertrain Blockset /
Propulsion /
Electric Motors and Inverters
Motor Control Blockset /
Electrical Systems /
Motors
描述
Induction Motor 模块实现三相感应电机。该模块使用三相输入电压来调节各相电流,从而控制电机转矩或转速。
注意
该模块的参数使用星形等效感应电机的每相值。
默认情况下,该模块将仿真类型参数设置为连续以便在仿真期间使用连续采样时间。如果要为定步长双精度和单精度目标生成代码,请考虑将参数设置为离散。然后指定采样时间 Ts 参数。
三相正弦模型电气系统
该模块实现在静止转子参考 (dq) 系中表示的方程。d 轴与 a 轴对齐。转子参考系中的所有量都是相对于定子来描述的。
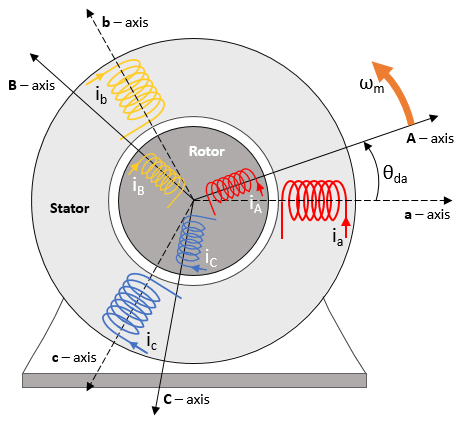
该模块使用以下方程来计算电角速度 (ωem) 和转差速度 (ωslip)。
为了计算相对于转子 A 轴 (dA) 的 dq 转子电角速度,该模块使用定子 A 轴 (da) 转速和转差速度之间的差值:
为了简化磁通、电压和电流变换的方程,该模块使用转子 A 轴参考系:
| 计算 | 方程 |
|---|---|
| 磁通 |
|
| 电流 |
|
| 电感 |
|
| 电磁转矩 |
|
功率不变的 dq 变换,以确保 dq 和三相功率相等 |
|
上述方程用到了以下变量。
ωm | 转子的角速度(弧度/秒) |
ωem | 电气转子转速(弧度/秒) |
ωslip | 电气转子转差速度(弧度/秒) |
ωsyn | 同步转子转速(弧度/秒) |
ωda | dq 定子相对于定子 a 轴的电角速度(弧度/秒) |
ωdA | dq 定子相对于转子 A 轴的电角速度(弧度/秒) |
Θda | dq 定子相对于定子 a 轴的电角(弧度) |
ΘdA | dq 定子相对于转子 A 轴的电角(弧度) |
Lq, Ld | q 轴和 d 轴电感 (H) |
Ls | 定子电感(H) |
Lr | 转子电感 (H) |
Lm | 磁化电感(H) |
Lls | 定子泄漏电感(H) |
Llr | 转子泄漏电感(H) |
vsq, vsd | 定子 q 轴和 d 轴电压 (V) |
isq, isd | 定子 q 轴和 d 轴电流 (A) |
λsq, λsd | 定子 q 轴和 d 轴磁通 (Wb) |
irq, ird | 转子 q 轴和 d 轴电流 (A) |
λrq, λrd | 转子 q 轴和 d 轴磁通 (Wb) |
| va, vb, vc | 定子电压 a、b、c 相 (V) |
| ia, ib, ic | 定子电流 a、b、c 相 (A) |
Rs | 定子绕组的电阻 (ohm) |
Rr | 转子绕组的电阻 (ohm) |
P | 极对数 |
Te | 电磁转矩 (Nm) |
机械系统
电机角速度由下式给出:
上述方程用到了以下变量。
J | 电机和负载的组合惯量 (kgm^2) |
F | 电机和负载的组合粘性摩擦(N·m/(弧度/秒)) |
θm | 电机机械角位置(弧度) |
Tm | 电机轴转矩 (Nm) |
Te | 电磁转矩 (Nm) |
Tf | 电机轴静态摩擦转矩 (Nm) |
ωm | 电机的机械角速度(弧度/秒) |
功率计算
对于功率计算,该模块实现下列方程。
| 总线信号 | 描述 | 变量 | 方程 | ||
|---|---|---|---|---|---|
|
|
| 机械功率 | Pmot | |
PwrBus | 电功率 | Pbus | |||
|
| PwrElecLoss | 电阻功率损失 | Pelec | ||
PwrMechLoss | 机械功率损失 | Pmech | 当端口配置设置为转矩时: 当端口配置设置为转速时: | ||
|
| PwrMtrStored | 储存的电机功率 | Pstr | ||
上述方程用到了以下变量。
Rs | 定子电阻(欧姆) |
Rr | 转子电阻(Ohm) |
ia, ib, ic | 定子相 a、b 和 c 电流 (A) |
isq, isd | 定子 q 轴和 d 轴电流 (A) |
van, vbn, vcn | 定子相 a、b 和 c 电压 (V) |
ωm | 转子的机械角速度(弧度/秒) |
F | 电机和负载的组合粘性阻尼(N·m/(弧度/秒)) |
Te | 电磁转矩 (Nm) |
Tf | 电机和负载的组合摩擦转矩 (Nm) |
端口
输入
输出
参数
提示
如果您要通过输入端口来提供电机参数(而不是通过将其指定为模块参数),请使用 Induction Motor HDL 模块。
参考
[1] Mohan, Ned. Advanced Electric Drives: Analysis, Control and Modeling Using Simulink. Minneapolis, MN: MNPERE, 2001.
扩展功能
版本历史记录
在 R2020b 中推出