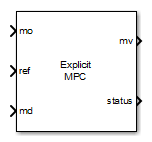
Explicit MPC Controller
Explicit model predictive controller
Libraries:
Model Predictive Control Toolbox
Description
The Explicit MPC Controller block uses the following input signals:
Either measured plant outputs (
mo) or custom state estimate (x[k|k])Reference or setpoint (
ref)Measured plant disturbance (
md), if any
The Explicit MPC Controller block uses a lookup table to store the precalculated piecewise-affine optimal control law instead of solving a quadratic programming optimization problem at runtime at each control interval like the MPC Controller block. Given the same MPC problem, the two blocks return the same solution. The Explicit MPC Controller block requires less online computational effort, which is useful for applications that need a short control interval. It has, however, a heavier offline computational effort and a larger memory footprint. Indeed, the combinatorial nature of explicit MPC restricts its usage to applications with relatively few inputs, outputs, and state variables, a short prediction horizon, and few output constraints.
The Explicit MPC Controller supports only a subset of optional MPC features, as outlined in the following table.
| Supported Features | Unsupported Features |
|---|---|
|
|
Examples
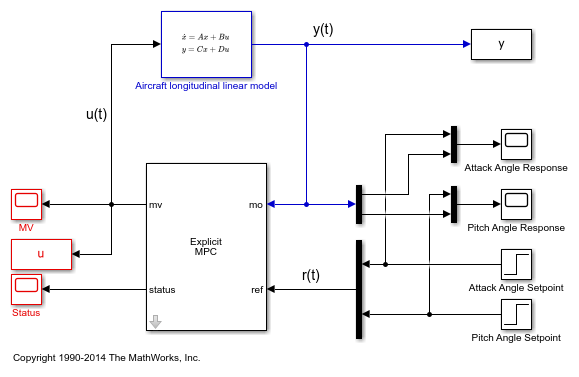
Explicit MPC Control of Aircraft with Unstable Poles
Control an unstable aircraft with saturating actuators using an explicit model predictive controller.
Explicit MPC Control of DC Servomotor with Constraint on Unmeasured Output
Design an explicit model predictive controller for a DC servomotor with constraints on the manipulated variable and unmeasured output.
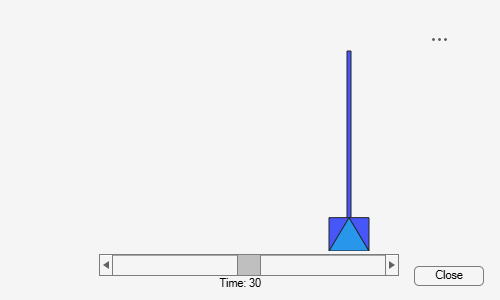
Explicit MPC Control of an Inverted Pendulum on a Cart
Control an inverted pendulum in an unstable equilibrium position using an explicit model predictive controller.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2014b