基于求解器的边界约束二次规划
此示例说明如何通过求解二次优化问题来确定马戏团帐篷的形状。帐篷由厚重的弹性材料制成,在约束下形成具有最小势能的形状。问题的离散化导致了有界约束的二次规划问题。
有关此示例的基于问题的版本,请参阅 基于问题的有界约束二次规划。
问题定义
考虑搭建一个马戏团帐篷来覆盖一块方形场地。帐篷有五根杆子,上面覆盖着厚重的弹性材料。问题在于找到帐篷的自然形状。将形状建模为位置 p 处帐篷的高度 x(p)。
重物被提升到高度 x 的势能为 cx,其中 c 为常数,与物的重量成比例。对于这个问题,选择 c = 1/3000。
一块材料 的弹性势能大约与材料高度的二阶导数乘以高度成正比。您可以通过 5 点有限差分近似来近似二阶导数(假设有限差分步骤的大小为 1)。让 表示在第一个坐标方向上移动 1,让 表示在第二个坐标方向上移动 1。
帐篷的自然形状使总势能最小化。通过离散化问题,您会发现要最小化的总势能是 + cx(p) 的所有位置 p 的总和。
该势能是变量 x 的二次表达式。
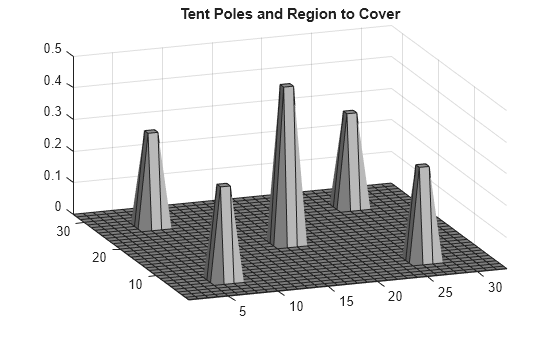
指定边界条件,即帐篷边缘的高度为零。帐篷杆的横截面为 1×1 单位,帐篷的总尺寸为 33×33 单位。指定每根杆的高度和位置。绘制方形地块区域和帐篷杆。
height = zeros(33); height(6:7,6:7) = 0.3; height(26:27,26:27) = 0.3; height(6:7,26:27) = 0.3; height(26:27,6:7) = 0.3; height(16:17,16:17) = 0.5; colormap(gray); surfl(height) axis tight view([-20,30]); title('Tent Poles and Region to Cover')
创建边界条件
height 矩阵定义了解 x 的下界。为了将解限制为边界上的零,请将上界 ub 设置为边界上的零。
boundary = false(size(height));
boundary([1,33],:) = true;
boundary(:,[1,33]) = true;
ub = inf(size(boundary)); % No upper bound on most of the region
ub(boundary) = 0;创建目标函数矩阵
quadprog 问题表示为最小化
.
在这种情况下,线性项 对应于材料高度的势能。因此,为 x 的每个分量指定 f = 1/3000。
f = ones(size(height))/3000;
使用 delsq 函数创建表示 的有限差分矩阵。delsq 函数返回一个稀疏矩阵,其中条目 4 和 -1 与 公式中的条目 4 和 -1 相对应。将返回的矩阵乘以 2,让 quadprog 使用 给出的能量函数求解二次规划。
H = delsq(numgrid('S',33+2))*2;查看矩阵 H 的结构。矩阵对 x(:) 进行操作,也就是说矩阵 x 通过线性索引转换为向量。
spy(H);
title('Sparsity Structure of Hessian Matrix');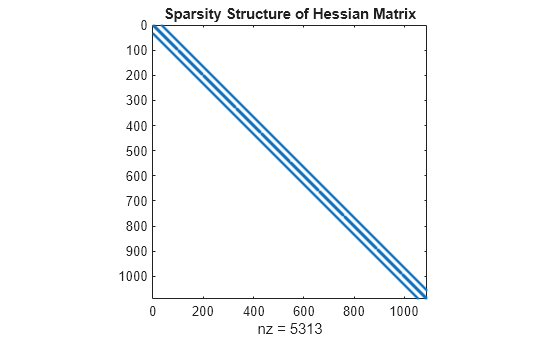
运行优化求解器
通过调用 quadprog 求解问题。
x = quadprog(H,f,[],[],[],[],height,ub);
Minimum found that satisfies the constraints. Optimization completed because the objective function is non-decreasing in feasible directions, to within the value of the optimality tolerance, and constraints are satisfied to within the value of the constraint tolerance. <stopping criteria details>
对解进行绘图
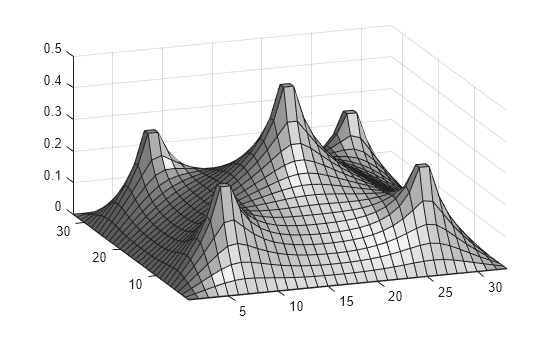
将解 x 重塑为矩阵 S。然后绘制解。
S = reshape(x,size(height));
surfl(S);
axis tight;
view([-20,30]);