Radar Link Budget Analysis
This example shows how to use the Radar Designer app to perform radar link budget analysis and design a radar system based on a set of performance requirements. Radar Designer allows a user to design a new radar system starting from one of five preset radar types, set the performance requirements, compute radar metrics, configure the environment, and compare several alternative designs. You can also export the design as a MATLAB® script for further analysis.
Introduction
The radar range equation is a powerful tool that ties together the main parameters of a radar system. It can give a radar engineer a good idea about performance of the system without resorting to complex analysis and simulations. The radar equation is especially useful in early stages of the design when specific information about various components (for example, transmitted waveform, size or shape of the antenna array, signal processing algorithms, and so on) might not yet be available. Although the radar equation provides only approximate results, the fidelity of the analysis can be significantly improved by considering losses introduced by the components of the radar system and the signal propagation medium. The Radar Designer app is a tool for performing the radar equation analysis also known as the radar link budget analysis. It provides a user with many tunable parameters for the radar system, the target, and the environment, and offers a set of visualizations to aid with a choice of these parameters. The Radar Designer app also allows to design a radar system based on a set of performance requirements.
This example shows how to use the Radar Designer app to design an X-band surveillance radar for detecting small targets. The design is based on the following requirements specification:
The peak transmit power should not exceed 2000 W
The radar should provide 360-degree coverage in azimuth and 60 degrees coverage in elevation
The radar should detect small manned aircraft with the radar cross section of 1 m at ranges from 300 m to 18 km
The radar should detect small unmanned aircraft (UAS) with the radar cross section of 0.03 m at ranges from 300 m to 8 km
The probability of detection and false alarm should be 0.9 and 1e-6, respectively
The radar should resolve two targets with the same azimuth and elevation separated in range by 30 m
The radar should have range, azimuth, and elevation accuracies of 5 m, 0.5 deg, and 1 deg, respectively
The radar should detect targets with velocities up to 180 km/h
The radar should maintain its accuracy and detection performance in heavy rain (16 mm/hr) conditions
New Session
The Radar Designer app can be launched by using the command:
radarDesigner
By default, the application allows a user to either start a new or open an existing session using the corresponding buttons in the toolstrip. A new session offers a choice of one of the five predefined radar types: airborne, airport, automotive, tracking, and weather. In this example we use the default airport radar as a starting point.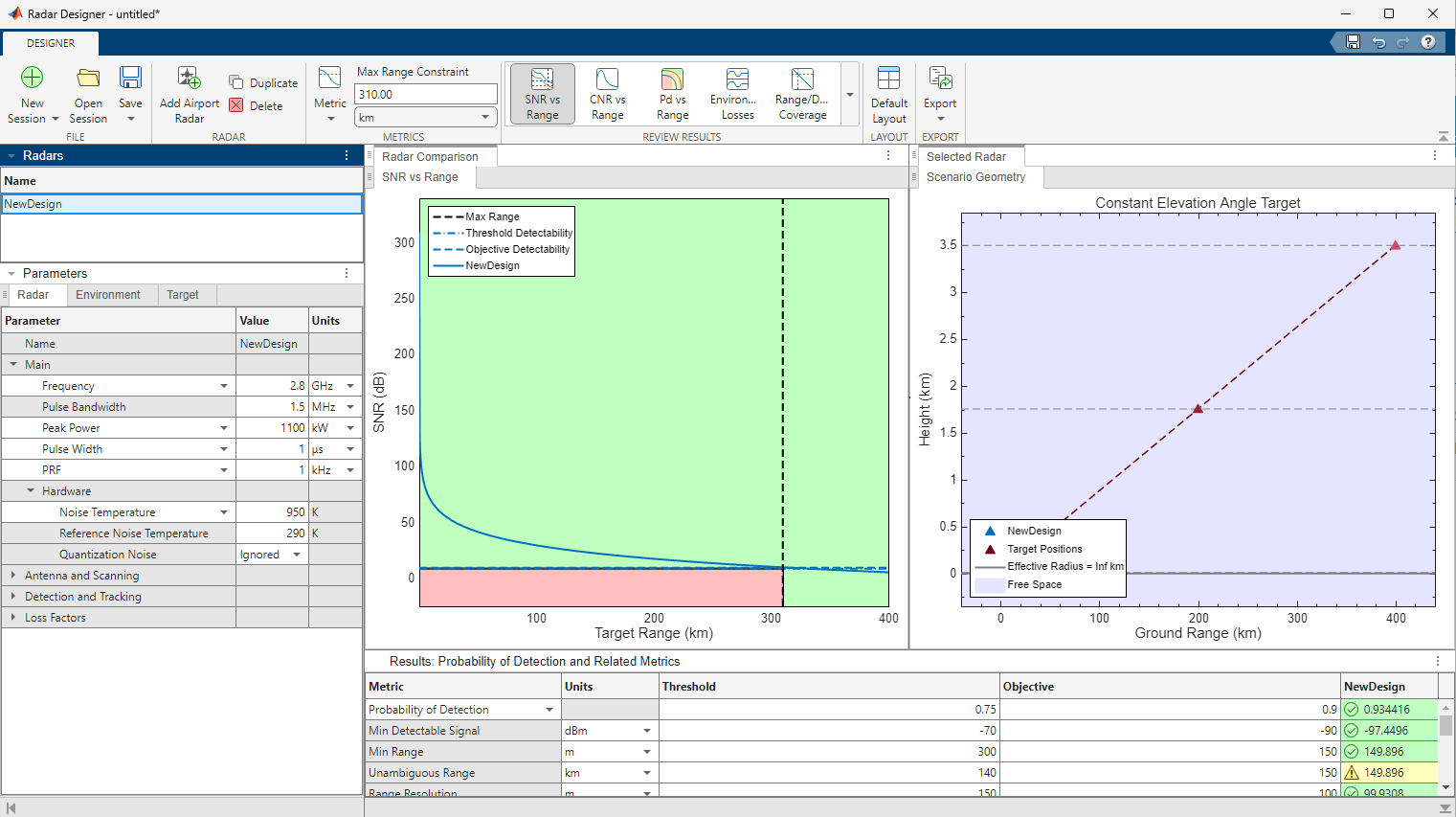
Once a new session is loaded, the Radar Designer app presents a user the following document groups:
Radar, Target, and Environment parameter panels on the left
SNR vs. Range and Scenario Geometry plots in the center and right
Results table at the bottom
It is possible to change the name of the new session at the top of the Radar parameter panel. To do so, click AirportRadar under the Name section in the Radar Library. Then, change the name are desired.
Metrics and Requirements
In this example we have a specification detailing the performance of the final system. However, it does not specify all the design parameters needed to achieve the required levels of performance. Most of the design parameters must be derived from the requirements given in the specification. The Radar Designer app provides a way to derive the radar design parameters from the performance requirements.
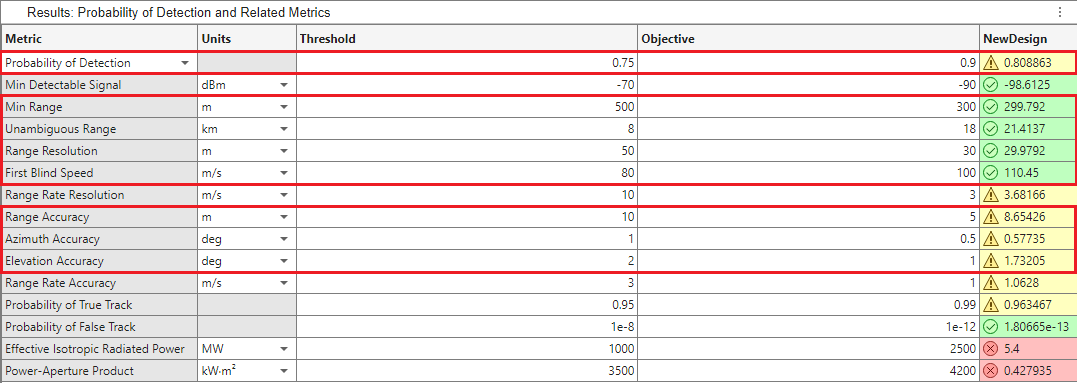
The performance metrics and the corresponding requirements are housed in the Results table. For each performance metric the app has two requirement values:
Threshold— Describes the minimum performance level for the metricObjective— Defines the value of the metric that will enable the new system to fully satisfy mission needs
The values between Threshold and Objective constitute the trade-space that can be used by a radar engineer to balance multiple, sometimes conflicting, performance requirements.
The computed metrics, which are shown in the Results table, can be constrained by either the maximum range or the probability of detection. A choice of which variable to use as a constraint is made through the Metric button in the Metric section of the toolstrip. Selecting maximum range as a constraint means that the performance metrics displayed in the Results table are computed at the specified maximum range. Selecting the probability of detection as a constraint means that the displayed metrics are computed assuming the specified value of the probability of detection. In this example we are interested in two ranges: 1) 18 km for manned aircraft, and 2) 8 km for UAS. We start with the manned aircraft and set the Metric in the toolstrip to the maximum range constraint of 18 km.

As the next step, we populate the Threshold and Objective values of the Results table with the numbers given in the specification. In this example the specification provides only a single value for each performance metric. We use this value to set the Objective requirement. We then set the corresponding Threshold to a reasonable value close to the Objective. Although the desired performance of the system is defined by the Objective requirement, the system is considered to have an acceptable performance if the Threshold requirement is met. This flexibility is needed to create the trade-space for selecting the design parameters, which otherwise could be difficult or impossible to choose. Since the specification does not provide requirements for all the metrics shown in the table, we leave the requirements for these metrics set to the default values.

Target Parameters
The target parameters are set in the Target parameter panel. Since we are considering the small manned aircraft first, we set the radar cross section of the target to 1 m. The Swerling Model is changed to Swerling 1 to model more realistic fluctuating targets.

Radar Parameters
After the requirements and the target parameters have been set, we can start adjusting the radar design parameters such that the computed metrics meet the stated requirements. The Radar Designer app provides a convenient way to monitor the status of the computed metrics while changing the value of the design parameters. The entries of the Results table are color coded to indicate the status of the computed metrics. Metrics that meet the corresponding Objective requirement are colored in green, metrics with the values between the Threshold and Objective are colored in yellow, and the metrics that do not meet the Threshold requirement are colored in red. The same colors are also used in the SNR vs. Range and Pd vs. Range plots to show the ranges at which the detection requirements are satisfied. Gray is also used in the plots to mark the region beyond the maximum range and less than the objective requirement.
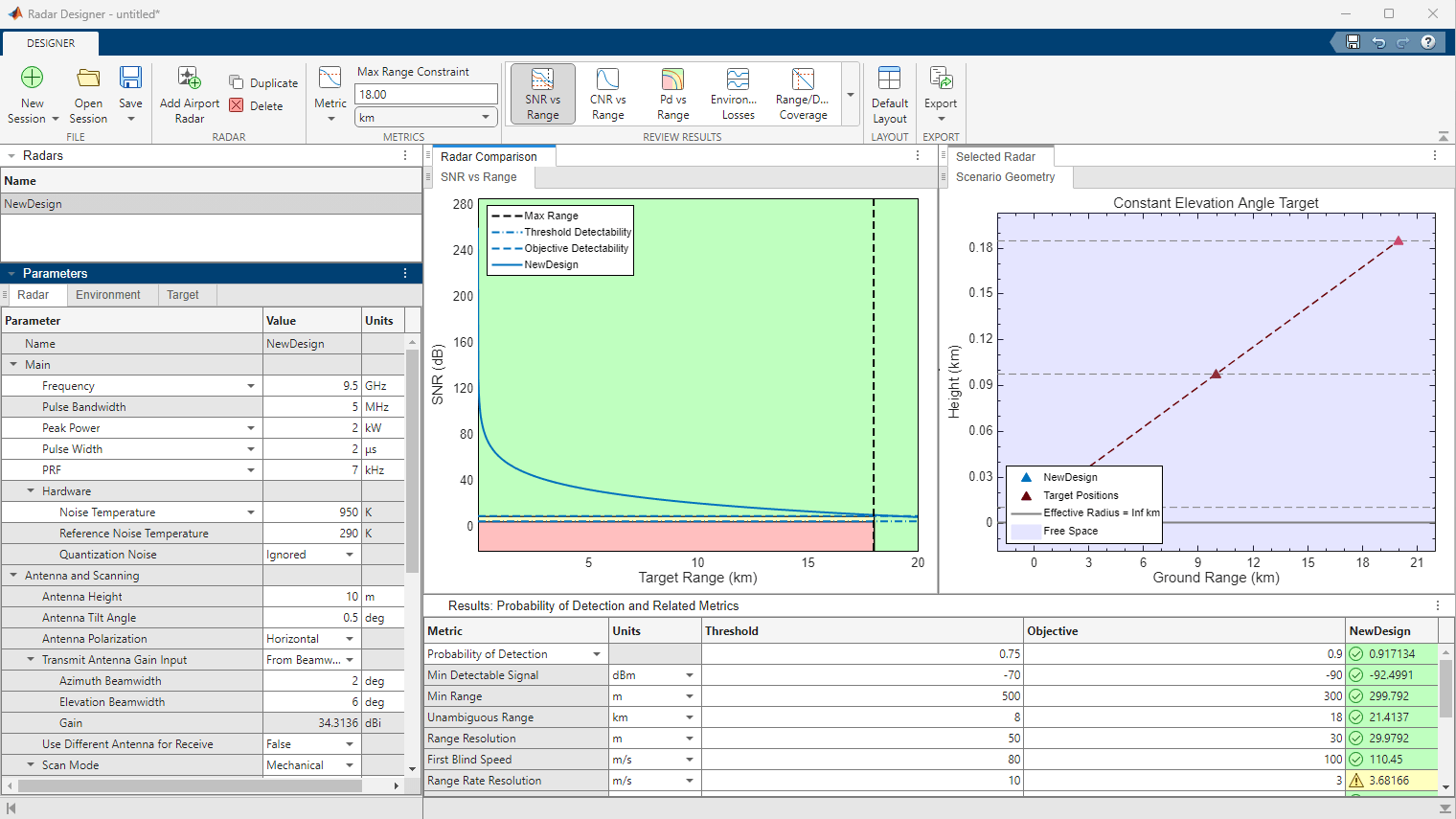
To guarantee that the 1 m RCS target is detected at the desired range of 18 km, we adjust the radar design parameters to make sure that the SNR curve in the SNR vs. Range plot is above the Objective Detectability line at Max Range.
The radar design parameters are divided into four sections. Each section is adjusted as follows:
Main. The radar operating frequency and the peak power are set to the values given in the specification. The pulse bandwidth is adjusted to meet the range resolution requirements and the pulse width is set to achieve high enough available SNR at the maximum range. The 7 kHz PRF value is selected to find a tradeoff between the 21.4 km unambiguous range and the maximum unambiguous velocity of 198 km/h (the first blind speed of 396 km/h). The Range/Doppler Coverage plot, accessed through the Range/Doppler Coverage button in the Review Results section of the toolstrip, is used to visualize the trade-space between the range and velocity of the target.

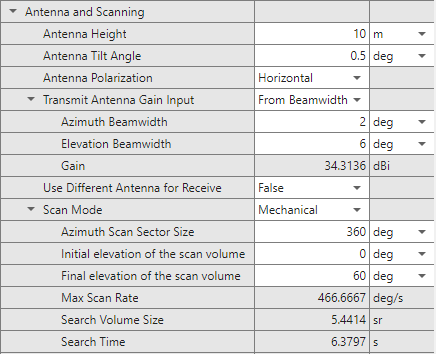
Antenna and Scanning. Antenna height, tilt, and polarization are left unchanged. The azimuth and elevation antenna beamwidth are set to 2 and 6 degrees, respectively, to meet the azimuth and elevation accuracy requirements. The Scan Mode is set to
Mechanicalto facilitate 360-degree coverage in azimuth, and the scan sector elevation dimension is set to 60 degrees as given in this specification. The Antenna and Scanning section also shows that the size of the search volume is 5.441 steradians and the time it takes to scan this volume is 8.5329 seconds. Including scanning in the analysis adds the beam shape loss and the beam-dwell factor to the link budget.
Detection and Tracking. The probability of false alarm is set to the required value of 1e-6. The number of coherently integrated pulses is selected such that the
Objective Detectabilityvalue that determines the SNR required to detect a Swerling 1 case target with the desired probabilities of detection and false alarm of 0.9 and 1e-6 respectively, is below the available SNR at the specified maximum range constraint of 18 km.

Loss Factors. To account for losses due to pulse eclipsing we add the statistical eclipsing loss to the link budget analysis.

After these adjustments, the Results table shows that this design satisfies the specification for small manned aircraft with RCS of 1 m or larger. From the SNR vs. Range plot we can see that the detectability factor required to achieve the Objective detection probability of 0.9 is approximately 10 dB, while the detectability factor for the Threshold requirement of 0.75 is close to 5 dB. Since the available SNR curve is above the Objective Detectability line at 18 km, the resulting probability of detection is higher than the required Objective value and equals to 0.917. The Results table also displays that the minimum detectable signal required to detect a 1 m target with this probability of detection is –92.5 dBm.

Environment Parameters
Until now this example assumed free space propagation without any atmospheric attenuation. To make the analysis more accurate, losses due to propagation and atmospheric attenuation can be included and parametrized through the Environment parameter panel.
The specification states that the radar under design must maintain the required detection performance and the measurement accuracy in heavy rain (16 mm/hr). To include the path loss due to precipitation in the analysis, we set Precipitation Type to Rain in the Precipitation section of the Environment panel. We then choose ITU model and set the precipitation ranges such that 16 mm/hr rain is present in all ranges of interest. Now the Results table and the SNR vs. Range plot show that the probability of detection at the maximum range is much lower than the required 0.9.
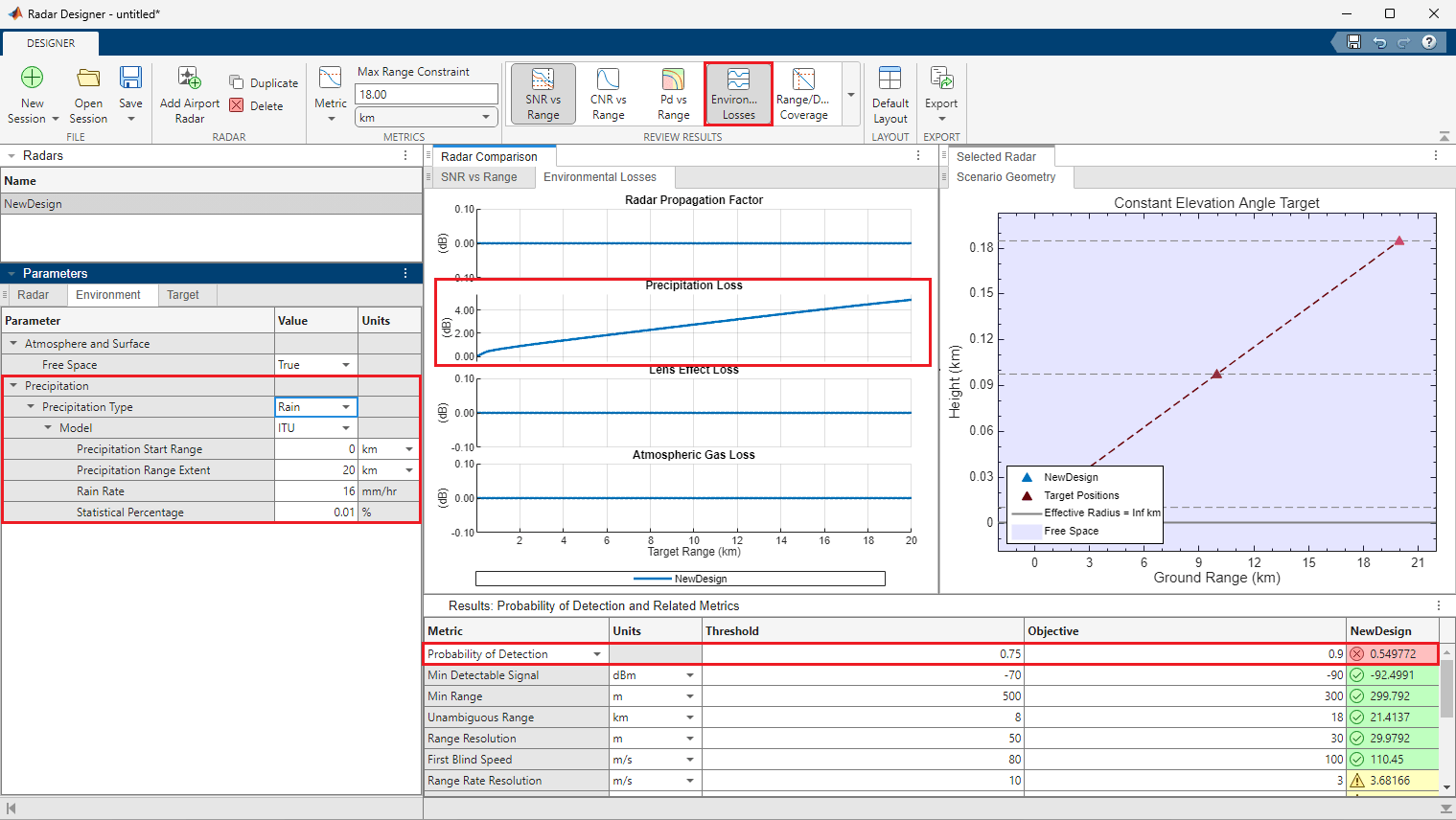
The Environmental Losses plot gives a better idea about the contribution of the precipitation loss to the overall loss budget. It is accessed through the Environmental Losses button in the Analysis section of the toolstrip. This plot visualizes four types of range-dependent losses due to propagation and atmospheric attenuation. The Precipitation Loss subplot shows that 16 mm/hr rain creates an additional loss of 4.5 dB at 18 km. This results in the probability of detection dropping from 0.91 to 0.55, which is below the Threshold requirement. Thus, the performance of the system becomes unacceptable in heavy rain conditions and does not meet the specification.
M-of-N CPI Integration
The probability of detection can be improved by either increasing the SNR available at the receiver or by decreasing the SNR required to make a detection (the detectability factor). The latter approach might be more attractive in practice since decreasing the detectability factor can be accomplished through application of signal processing techniques that do not require making changes in the hardware. The detectability factor can be decreased by integrating more pulses. However, target RCS fluctuation usually imposes a limit on the amount of pulses that can be coherently integrated. A possible solution to integrating more pulses while addressing the problem of the RCS fluctuation is the M-of-N integration over multiple coherent processing intervals (CPIs). Within each CPI the pulses are integrated coherently, and then the M-of-N integration is applied across CPIs. Navigating to the Radar parameter panel and setting the number of CPIs in the Detection and Tracking section to 3 and the number of CPIs with a detection to 2 increases the resulting probability of detection from 0.55 to 0.8.

Although the probability of detection is still below the specified Objective value, it meets the Threshold requirement. This means that the system has an acceptable detection performance in heavy rain. Similarly, the range, azimuth, and elevation accuracies clear the Threshold requirement but are below their respective Objective values.
Open this design in Radar Designer.
radarDesigner('SurveillanceRadarSmallTargets.mat')
Small UAS
To verify whether this radar design will have a satisfactory performance when the target is a small UAS, we change the target RCS to 0.03 m and set the metric constraint to maximum range of 8 km. The SNR vs. Range plot shows that the available SNR for this design is above the Objective Detectability line at 8 km, and the resulting probability of detection at that range is 0.94, which is well above the required value. The system is able to satisfy the Objective requirement for the probability of detection at 8 km because the impact of the atmospheric attenuation is smaller at closer ranges.

The resulting range, azimuth, and the elevation accuracies, however, are still below the Objective and above the Threshold requirements.
Export
The Radar Designer allows exporting the created design as a MATLAB script by clicking the Export button in the Export section of the toolstrip and selecting Export Detectability Analysis MATLAB Script. The exported script contains the selected radar, target, and environment parameters, and reproduces the SNR vs. Range and the Environmental Losses plots shown in this example. It can be used to further experiment, enhance, and modify the design. In addition, the results shown in the Results table can also be exported as a separate MATLAB script by clicking Export and then choosing Generate Metrics Report. When executed, this script outputs a formatted report for the computed metrics.

Summary
This example shows how to use the Radar Designer app to perform link budget analysis of a surveillance radar system for detecting small targets. The example starts with a specification and a set of performance requirements. It shows how to set the Objective and Threshold requirements based on the values provided in the specification. Then it shows how to adjust the radar design parameters with the help of the SNR vs. Range plot and the stoplight color coding such that the design meets the stated requirements. The example also shows how to change the target parameters to model manned and unmanned aircraft, and how to configure the environment settings to include atmospheric loss due to precipitation into the analysis.