Simulating Radar Datacubes in Parallel
This example shows how to simulate datacubes from an S-band terminal airport surveillance radar in serial and in parallel. The performance of both approaches is compared.
The full functionality of this example requires Parallel Computing Toolbox™.
Create Radar Scenario
First initialize the random number generator for reproducible results.
rng('default') % Initialize random number generator
Next, specify parameters for an S-band surveillance radar. The radar system will be operating with a bandwidth of 1.5 MHz, a peak power of 1 MW, and a pulse repetition frequency (PRF) of 1 kHz.
% Radar inputs freq = 2.8e9; % Frequency (Hz) bw = 1.5e6; % Bandwidth (Hz) peakPwr = 1e6; % Peak power (W) pw = 1e-6; % Pulse width (s) prf = 1e3; % PRF (Hz) nf = 3; % Noise figure rdrHgt = -10; % Radar height (m) rdrTilt = 3; % Radar tilt angle (deg) numPulses = 24; % Number of pulses rotRate = 6; % Rotation rate (deg/s) fs = 2*bw; % Sample rate (Hz) arraySize = 16; % Array size (elements)
This example will investigate processing times with simulated numbers of coherent processing intervals (CPIs) ranging from 20 to 200. Each datacube is of size 3000 range samples-by-16 elements-by-24 pulses. Each CPI simulation is performed 3 times.
numCPIs = [20:10:100 150 200]; % Number of CPIs numTrials = 3; % Number of trials for each number of CPIs
200 CPIs is equivalent to a scan of about 29 degrees.
pri = 1/prf; % Pulse repetition interval (s) cpiTime = numPulses*pri; % CPI time (s) numDegrees = (max(numCPIs) - 1)*cpiTime*rotRate % Number of degrees
numDegrees = 28.6560
Define parameters for a target at a starting range of 3 km and with a radar cross section (RCS) of 10 dBsm. A 10 dBsm RCS is representative of a large aircraft. The aircraft will be moving at a speed of 65 m/s.
% Target inputs tgtRCS = 10; % Target RCS (dBsm) tgtRng0 = 3e3; % Target initial range (m) tgtEl = -3; % Target elevation angle (deg) tgtSpd = 65; % Target speed (m/s) tgtHgt = tgtRng0.*sind(tgtEl); % Target height (m)
Initialize a radar scenario with an update rate equal to 1 coherent processing interval (CPI).
% Create scenario maxNumCPIs = max(numCPIs); scene = radarScenario('UpdateRate',1/cpiTime,'StopTime',maxNumCPIs*cpiTime);
Create an instance of radarTransceiver to generate IQ. Configure the radarTransceiver such that it is mechanically scanning in a circular pattern with a rotation rate equal to 6 degrees per second. The number of repetitions should be set to the number of pulses in the CPI, which is 24 for this example.
% Create radar sensor rdr = radarTransceiver('MountingAngles',[0 rdrTilt 0],'NumRepetitions',numPulses, ... 'MechanicalScanMode','Circular','MechanicalScanRate',rotRate);
Transmit a linear frequency modulated (LFM) waveform.
% Transmit an LFM rdr.Waveform = phased.LinearFMWaveform('SampleRate',fs,'PRF',prf, ... 'PulseWidth',pw,'SweepBandwidth',bw);
Update the radar with the other settings from above. Modify the antenna such that it is a uniform linear array (ULA) with 16 elements.
% Configure the radar
rdr.Transmitter.PeakPower = peakPwr;
lambda = freq2wavelen(freq);
ula = phased.ULA(arraySize,lambda/2);
rdr.TransmitAntenna.Sensor = ula;
rdr.Transmitter.Gain = 10;
rdr.TransmitAntenna.OperatingFrequency = freq;
rdr.ReceiveAntenna.Sensor = ula;
rdr.ReceiveAntenna.OperatingFrequency = freq;
rdr.Receiver.NoiseFigure = nf;
rdr.Receiver.SampleRate = fs;
rdr.Receiver.Gain = 10; Attach the radar to a platform.
% Attach radar to a platform rdrplat = platform(scene,'Position',[0 0 rdrHgt],'Sensor',rdr);
Lastly, create a target platform within the scenario.
% Create target platform tgtTraj = kinematicTrajectory('Position',[tgtRng0 0 tgtHgt],'Velocity',tgtSpd*[cosd(tgtEl) 0 sind(tgtEl)]); rcsSig = rcsSignature('Pattern',tgtRCS); platform(scene,'Trajectory',tgtTraj,'Signature',rcsSig);
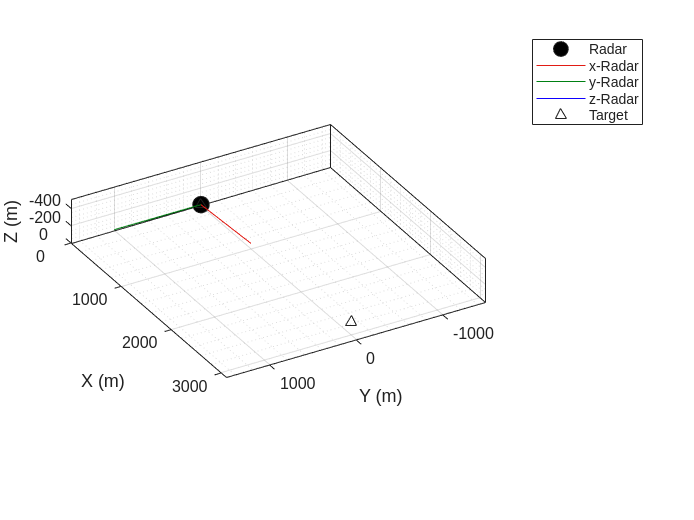
Plot the scenario using theaterPlot. Note that the coordinate system is North-East-Down (NED), so the positive z-axis is down.
% Initialize theater plot tPlot = theaterPlot('XLimits',[0 3.1e3],'YLimits',[-1.5e3 1.5e3],'ZLimits',[-500 0]); % Get platform dimensions profiles = platformProfiles(scene); dimensions = vertcat(profiles.Dimensions); % Get platform positions and orientations poses = platformPoses(scene); positions = vertcat(poses.Position); orientations = vertcat(poses.Orientation); % Initialize platform and coverage plotters orientPlotter = orientationPlotter(tPlot,'DisplayName','Radar',... 'LocalAxesLength',1e3); platPlotter = platformPlotter(tPlot,'DisplayName','Target'); % Plot scene plotPlatform(platPlotter,positions,dimensions,orientations); plotOrientation(orientPlotter,rdr.MountingAngles(3),rdr.MountingAngles(2),rdr.MountingAngles(1),rdrplat.Position)
Collect Datacubes
Now that the scenario, radar, and target have been configured, generate all the paths for the scenario. The paths include information like:
Path length
Path loss
Reflection coefficient
Angle of arrival/departure (AOA and AOD)
Doppler shift
This information is used by radarTransceiver to simulate returns from targets.
% Advance scenario and collect paths simTimes = cell(1,maxNumCPIs); pathsArray = cell(1,maxNumCPIs); pathGen = helperPaths(scene,'Position',rdrplat.Position); for ii = 1:maxNumCPIs advance(scene); simTimes{ii} = scene.SimulationTime; pathsArray{ii} = generatePaths(pathGen,rdr); end
In Serial
To generate datacubes serially, step the radarTransceiver within a loop using the previously computed paths and simulation times for the scenario. The simulation times for each CPI is logged within the elapsedTimeSerial variable. The median of the values in elapsedTimeSerial is taken for each number of CPIs tried.
% Initialize a vector to save off simulation times elapsedTimeSerial = zeros(numTrials,length(numCPIs)); for iCPI = 1:length(numCPIs) for iTrial = 1:numTrials % Initialize thisNumCPIs = numCPIs(iCPI); datacubesSerial = cell(1,thisNumCPIs); % Start the clock tic; % Step radarTransceiver for ii = 1:thisNumCPIs datacubesSerial{ii} = rdr(pathsArray{ii},simTimes{ii}); end % Get the elapsed time elapsedTimeSerial(iTrial,iCPI) = toc; end end
Within the elapsedTimeSerial matrix, the rows represent trials, and the columns represent numbers of CPIs.
% Elapsed time results numCols = numel(numCPIs) + 1; varTypes = repmat("double",1,numCols); varNames = ["Serial Trials",compose('%d CPIs',numCPIs)]; elapsedTimeSerialTable = table('Size',[numTrials,numCols],'VariableTypes',varTypes,'VariableNames',varNames); elapsedTimeSerialTable(:,1) = num2cell(1:numTrials).'; elapsedTimeSerialTable(1:numTrials,2:numCols) = num2cell(elapsedTimeSerial)
elapsedTimeSerialTable=3×12 table
1 2.1453 2.4573 3.0859 3.8226 4.7473 5.5038 6.5822 8.0110 8.2836 11.8854 16.5032
2 2.3309 2.3244 3.0724 3.9228 4.8138 5.6025 6.6370 7.3818 8.4552 11.7559 16.8186
3 3.7697 2.2651 3.1399 3.9556 4.6810 5.5928 7.5396 7.5865 8.1003 11.8862 17.6730
In Parallel
Next, perform the simulation using a parallel worker pool. This example was created using 8 workers. You can change this number based on the number of workers or central processing units (CPUs) in your system.
% Start parallel pool
parpool;Starting parallel pool (parpool) using the 'Processes' profile ... Connected to parallel pool with 8 workers.
The helper helperConfigureRadarTransceiver is used to create replicas of radarTransceiver. This is done to prevent the overhead of passing the preconfigured radarTransceiver class to the workers. In this way, each worker creates a radarTransceiver. Creating the classes on the workers is generally much faster than broadcasting clones. The simulation times for each CPI is logged within the elapsedTimeParallel variable. The median of the values in elapsedTimeParallel is taken for each number of CPIs tried.
% Initialize a vector to save off simulation times elapsedTimeParallel = zeros(numTrials,length(numCPIs)); for iCPI = 1:length(numCPIs) for iTrial = 1:numTrials % Initialize thisNumCPIs = numCPIs(iCPI); datacubesParallel = cell(1,thisNumCPIs); thisPathsArray = pathsArray(1:thisNumCPIs); thisSimTimes = simTimes(1:thisNumCPIs); % Start the clock tic; % Receive IQ parfor ii = 1:thisNumCPIs rdrParfor = helperConfigureRadarTransceiver(); datacubesParallel{ii} = rdrParfor(thisPathsArray{ii},thisSimTimes{ii}); end % Get elapsed time elapsedTimeParallel(iTrial,iCPI) = toc; end end
Similar to the elapsedTimeSerial matrix, the rows of elapsedTimeParallel represent trials, and the columns represent numbers of CPIs. Note that the first trial of the first number of CPIs takes much longer than the subsequent trials, because the code needs to be made available to the workers.
% Elapsed time results varNames = ["Parallel Trials",compose('%d CPIs',numCPIs)]; elapsedTimeParallelTable = table('Size',[numTrials,numCols],'VariableTypes',varTypes,'VariableNames',varNames); elapsedTimeParallelTable(:,1) = num2cell(1:numTrials).'; elapsedTimeParallelTable(1:numTrials,2:numCols) = num2cell(elapsedTimeParallel)
elapsedTimeParallelTable=3×12 table
1 9.8566 0.9419 2.1701 2.0286 2.0352 2.0714 2.6365 2.6665 3.1966 4.3188 6.0069
2 0.9132 0.9755 1.4549 3.5664 1.8023 2.0244 2.3368 2.7509 2.9112 4.6652 5.9557
3 0.7831 1.0585 1.3061 2.9374 1.6862 2.2385 2.5841 2.7274 2.8208 4.6443 6.2298
The simulation is now finished. Proceed to shut down the parallel pool.
delete(gcp('nocreate'));Parallel pool using the 'Processes' profile is shutting down.
Compare Approaches
First compare the resultant datacubes. Note that the two methods create similar results.
% Create a range-Doppler response object rngdop = phased.RangeDopplerResponse('SampleRate',fs); matchFilt = getMatchedFilter(rdr.Waveform); % Form a range-Doppler map for a serial datacube [respS,rngGrid,dopGrid] = rngdop(datacubesSerial{1},matchFilt); % Form a range-Doppler map for a parallel datacube respP = rngdop(datacubesParallel{1},matchFilt); % Range-Doppler map of serial computation figure tiledlayout(1,2); nexttile; hAxes = gca; helperPlotRDM(hAxes,rngGrid,dopGrid,respS,tgtRng0,'Serial'); % Range-Doppler map of parallel computation nexttile; hAxes = gca; helperPlotRDM(hAxes,rngGrid,dopGrid,respP,tgtRng0,'Parallel');

Calculate the median over the trials for each CPI.
% Compute medians of elapsed times
elapsedTimeSerialMedian = median(elapsedTimeSerial,1);
elapsedTimeParallelMedian = median(elapsedTimeParallel,1);Compare the elapsed times for simulating datacubes serially and in parallel.
% Plot elapsed times figure hAxes = axes; hP1 = plot(numCPIs,elapsedTimeSerialMedian,'o'); hold on hP2 = plot(numCPIs,elapsedTimeParallelMedian,'o'); % Plot best fit lines helperPlotBestFitLine(hAxes,numCPIs,elapsedTimeSerialMedian,1); helperPlotBestFitLine(hAxes,numCPIs,elapsedTimeParallelMedian,2); % Add labels grid on legend([hP1 hP2],'Serial','Parallel','Location','northwest') title('Datacube Simulation Times') xlabel('Number of CPIs') ylabel('Elapsed Time (sec)')
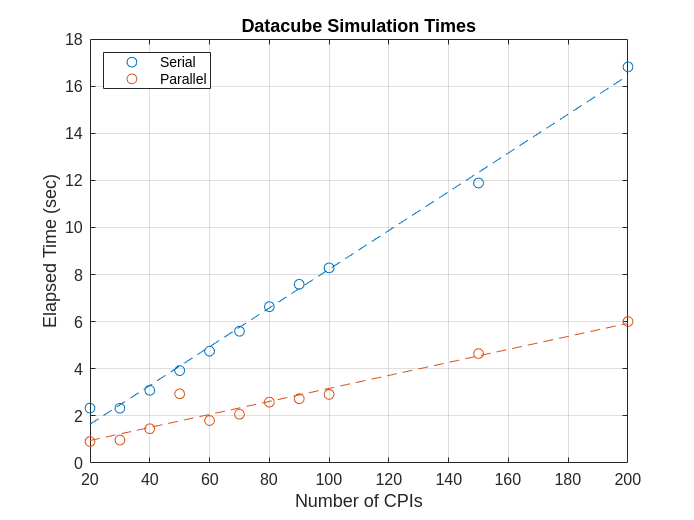
The figure shows that there is not much performance improvement for small numbers of CPIs. However, when generating larger numbers of CPIs, the parallel processing simulation time is generally faster.
speedUp = elapsedTimeSerialMedian(end)/elapsedTimeParallelMedian(end);
fprintf('The median parallel processing time is %.2f times faster than the median serial processing time for the %d CPIs case.',speedUp,numCPIs(end));The median parallel processing time is 2.80 times faster than the median serial processing time for the 200 CPIs case.
Summary
This example showed how to simulate datacubes from an S-band terminal airport surveillance radar serially and in parallel. When generating large numbers of CPIs, parallel processing was shown to improve performance. Parallelizing a simulation can be useful for radar simulations when there is a scanning radar and many CPIs must be generated for a search area.
Helpers
helperConfigureRadarTransceiver
function rdr = helperConfigureRadarTransceiver() % Helper creates a radarTransceiver for use with parfor % Radar inputs freq = 2.8e9; % Frequency (Hz) bw = 1.5e6; % Bandwidth (Hz) peakPwr = 1e9; % Peak power (W) pw = 1e-6; % Pulse width (s) prf = 1e3; % PRF (Hz) nf = 3; % Noise figure rdrTilt = 3; % Radar tilt angle (deg) numPulses = 24; % Number of pulses rotRate = 6; % Rotation rate (deg/s) fs = 2*bw; % Sample rate (Hz) arraySize = 16; % Array size (elements) % Create radar sensor rdr = radarTransceiver('MountingAngles',[0 rdrTilt 0],'NumRepetitions',numPulses, ... 'MechanicalScanMode','Circular','MechanicalScanRate',rotRate); % Transmit an LFM rdr.Waveform = phased.LinearFMWaveform('SampleRate',fs,'PRF',prf, ... 'PulseWidth',pw,'SweepBandwidth',bw); % Configure the radar rdr.Transmitter.PeakPower = peakPwr; lambda = freq2wavelen(freq); ula = phased.ULA(arraySize,lambda/2); rdr.TransmitAntenna.Sensor = ula; rdr.Transmitter.Gain = 10; rdr.TransmitAntenna.OperatingFrequency = freq; rdr.ReceiveAntenna.Sensor = ula; rdr.ReceiveAntenna.OperatingFrequency = freq; rdr.Receiver.NoiseFigure = nf; rdr.Receiver.SampleRate = fs; rdr.Receiver.Gain = 10; end
helperPlotRDM
function helperPlotRDM(hAxes,rngGrid,dopGrid,resp,tgtRng,titleStr) % Helper function to plot range-Doppler map (RDM) [~,idxRng] = min(abs(rngGrid - (tgtRng + 1e3))); hP = pcolor(hAxes,dopGrid,rngGrid(1:idxRng)*1e-3,mag2db(abs(squeeze(sum(resp(1:idxRng,:,:),2))))); hP.EdgeColor = 'none'; xlabel('Doppler (Hz)') ylabel('Range (km)') title(titleStr) hC = colorbar; hC.Label.String = 'Magnitude (dB)'; end
helperPlotBestFitLine
function helperPlotBestFitLine(hAxes,x,y,colorNum) % Helper function that creates a best fit line coefficients = polyfit(x,y,1); xFit = linspace(min(x),max(x),100); yFit = polyval(coefficients,xFit); plot(hAxes,xFit,yFit,'--','SeriesIndex',colorNum); end