FXOS8700 6-Axes Sensor
Get measurement of linear acceleration and magnetic field along the X, Y, and Z axes of the FXOS8700 6-Axes chip
Add-On Required: This feature requires the Simulink Coder Support Package for NXP FRDM-K64F Board add-on.

Libraries:
Simulink Coder Support Package for NXP FRDM-K64F
Board
Description
Add-On Required: This feature requires the Simulink Coder Support Package for NXP FRDM-K64F Board add-on.
The FXOS8700 6-Axes Sensor block measures the
linear acceleration and the magnetic field along the X, Y, and Z directions.
The block has two output ports, Magnet and Accel. The Magnet port
outputs the magnetic field from the magnetometer on the FXOS8700 6-Axes
chip as a [1x3] vector in uT.
The Accel port outputs the acceleration from the accelerometer on
the FXOS8700 6-Axes chip as a [1x3] vector in g
(9.8 m/s2). The number of output
ports vary depending on the active sensors that you select.

Using the parameters of this block, you can change the accelerometer
sensitivity by selecting a full-scale range of ±2g, ±4g,
or ±8g.
You can also select the Output Data Rates (ODR) for both of
the sensors. The Output Data Rates (ODR) for each sensor range from 1.563
Hz to 800 Hz. Interleaved magnetic and
acceleration data is available at ODR rates of up to 400 Hz.
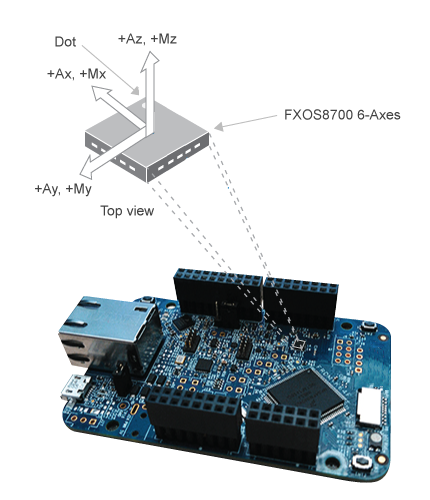
Chip Orientation and Axis Orientation Relative to Gravity
Place the board face up on a table, with the dot to the top-right corner of the FXOS8700 6-Axes chip. At this position, the X-axis points away from you, the Y-axis is horizontal and points to the left, and the Z-axis is vertical and points up.
The direction of the arrows shows the positive direction of the reading for the accelerometer and the magnetometer.
When you tilt the board along the X, Y, and Z axes of the chip, this illustration shows the acceleration and the magnetic field.
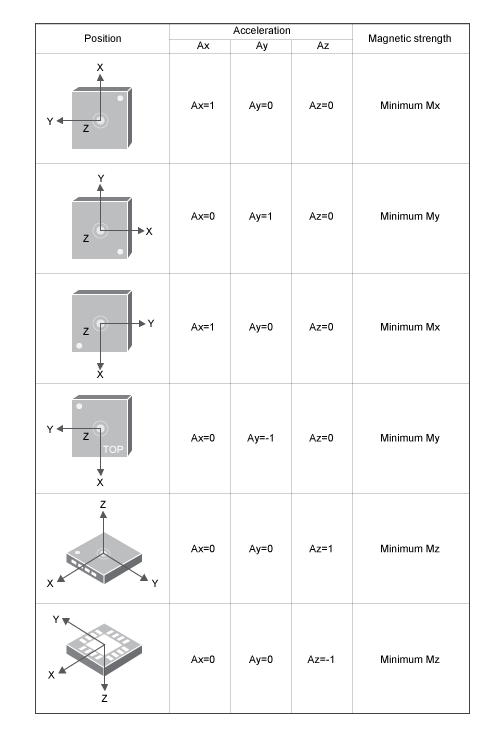
Hold the board so that the board faces you and the dot is to the top-right corner of the chip. The acceleration of gravity is static because the chip is stationary.
In the resultant [1x3] vector, the first value that represents the
acceleration at the X-axis ≈1 g
(9.81 m/s2).
The last two values that represent the acceleration at the
Y and Z axes
(perpendicular to the acceleration of earth gravity) ≈
0.00 g.
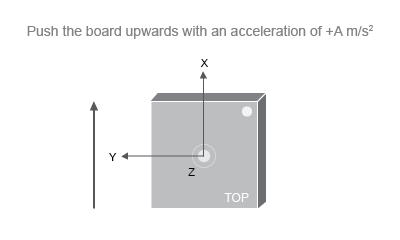
Push the board upward with an acceleration of A
m/s2. The
acceleration of the gravity is dynamic and equal to the
acceleration of the block minus the force of gravity ≈
(+A-9.81)
m/s2. In the
resultant [1x3] vector, the value of the
X-axis ranges between the
full-scale range value that you specify in the
Acceleration full scale range
parameter.
Hold the board so that the board faces you and the dot is to the top-right corner of the chip.
The magnetometer on the chip measures the earth magnetic
field along each sensor axis. In the resultant
[1x3] vector, the first value
that represents the magnetic strength at the
X-axis is minimum.
Examples
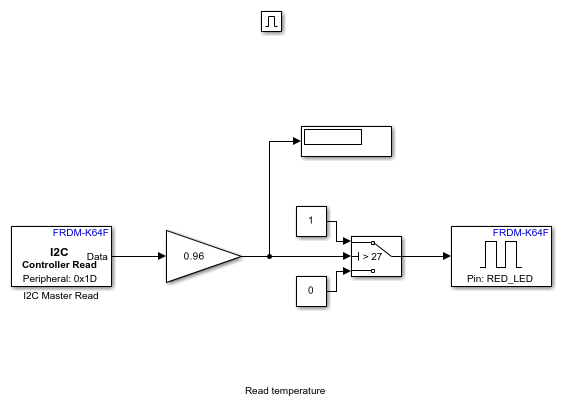
Read Temperature from an NXP FXOS8700CQ Sensor Available on NXP FRDM-K64F Hardware
Use Simulink® Coder™ Support Package for NXP™ FRDM-K64F Board to configure and read temperature from an NXP FXOS8700CQ sensor, which is a I2C-based sensor.
Ports
Output
Parameters
Version History
Introduced in R2016b