MMA8652FC 3-Axis Accelerometer
Get measurement of linear acceleration along the X, Y, and Z axes of the MMA8652FC 3-Axis chip
Libraries:
Simulink Coder Support Package for BBC
micro:bit/Accelerometer
Description
The MMA8652FC 3-Axis Accelerometer block measures the linear
acceleration along the X, Y, and Z axes. The block has one output port,
Accel. The Accel port outputs the acceleration from the as a
[1x3] vector in g (9.8
m/s2).
Using the parameters of this block, you can change the accelerometer
sensitivity by selecting a full-scale range of ±2 g,
±4 g, or ±8
g.
You can also select the Output Data Rates (ODR) for both of the sensors. The
Output Data Rates (ODR) ranges from 1.5625 Hz to
800 Hz.
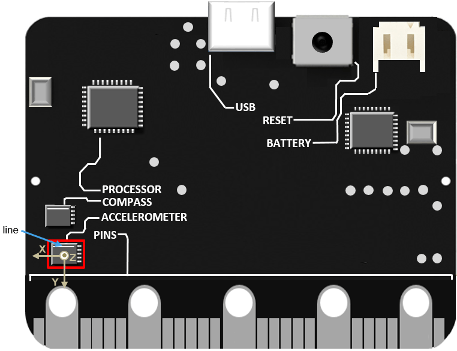
Chip Orientation and Axis Orientation Relative to Gravity
Hold the board so that the board faces you and the line to the top of the MMA8652FC 3-Axis chip is aligned horizontally to the table. At this position, the X-axis is horizontal and points to the left, the Y-axis is vertical and points down, and the Z-axis points towards you.
The direction of the arrows shows the positive direction of the reading for the accelerometer.
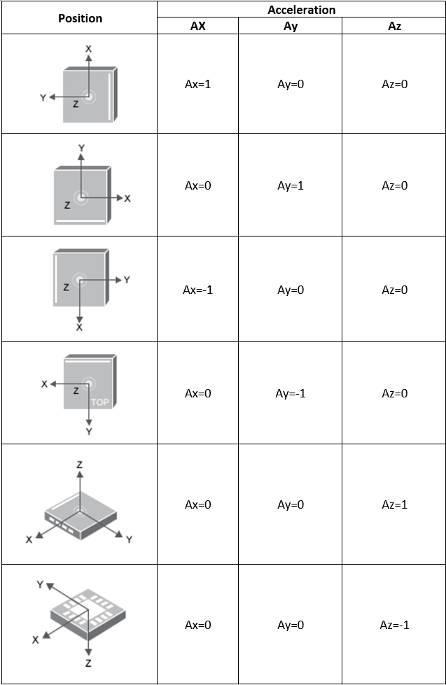
When you tilt the board along the X, Y, and Z axes of the chip, this illustration shows the acceleration.
Hold the board so that the board faces you and the line to the right of the chip is aligned vertically to the table. The acceleration of gravity is static because the chip is stationary.
In the resultant [1x3] vector, the first
value that represents the acceleration at the
X-axis ≈1 g (9.81
m/s2). The
last two values that represent the acceleration at the Y and
Z axes (perpendicular to the acceleration of earth gravity)
≈ 0.00 g.
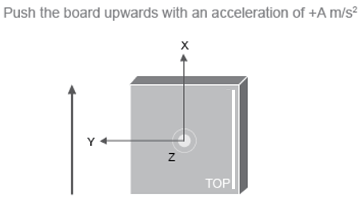
Push the board upward with an acceleration of A
m/s2. The
acceleration of the gravity is dynamic and equal to the
acceleration of the block minus the force of gravity ≈
(+A-9.81)
m/s2. In the
resultant [1x3] vector, the value of the
X-axis ranges between the
full-scale range value that you specify in the
Acceleration full scale range
parameter.
Ports
Output
Parameters
Version History
Introduced in R2018a