添加模型动态特性
动态力是指依赖于系统状态并随系统状态而变化的力。在模型中加入动态力(或称动态特性)可以提高保真度,但也会增加模型复杂度。在 Simscape™ Driveline™ 中,您可以在某些模块的参数化中添加动态特性(例如惯量),也可以添加模块来单独捕获动态特性。在模型设计过程中,首先省略动态力,然后随着模型保真度的提高逐步添加动态特性。
此示例展示了如何向一个简单的机械旋转模型添加惯量。通过输入以下命令打开一个简单的机械旋转系统模型:
openExample('sdl/SimpleRotationalMechanicalSystemExample')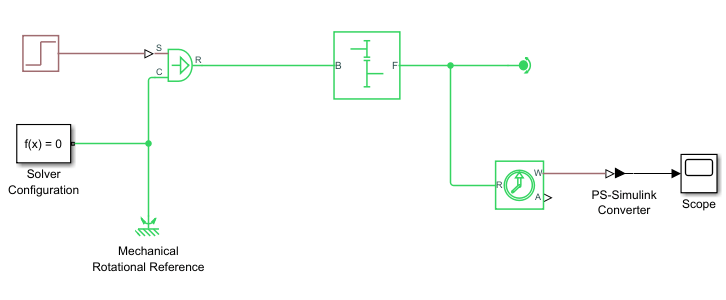
该模型使用 Ideal Angular Velocity Source 模块来表示驱动组件(例如 DC 电机)。
对间隙进行仿真是动态特性建模的一个示例。当啮合齿轮开始转动或改变方向时,就会形成间隙。啮合齿之间的间隙会在齿接触时导致快速振动。
要添加间隙,必须先向系统添加惯量。在 Simple Gear 模块和 Rotational Free End 模块之间放置一个 Inertia 模块。
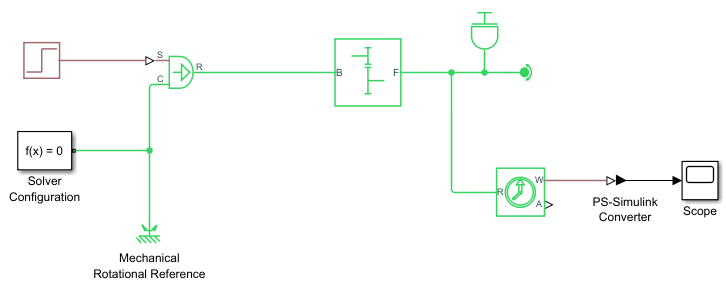
默认惯量为 0.01 kg*m^2。双击 Simple Gear 模块,然后在间隙选项卡中选择启用间隙。选择此参数可启用控制间隙影响的相关参数。要分析间隙对 Simple Gear 模块的输出速度的影响,请打开 Scope 模块并运行模型。
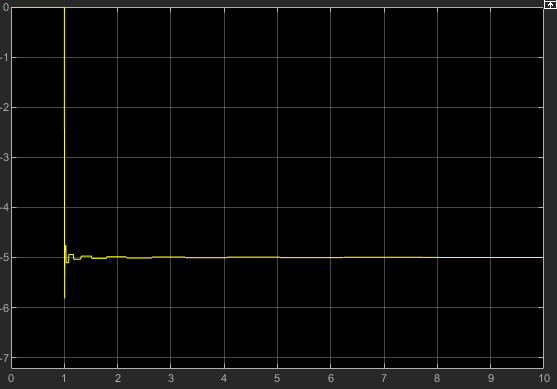
由于系统的惯量较小,因此系统启动时的间隙响应相对较小,振动也极小。增加惯量会增加计算成本,因为系统刚性变得更高,振动频率也会提高。
表示硬限位或离合器的模块可能会给 Simscape Driveline 模型引入快速动态特性和数值刚度。要试验模型刚度,请将 Inertia 模块中的惯量参数设置为 1 kg*m^2,然后再次运行仿真。
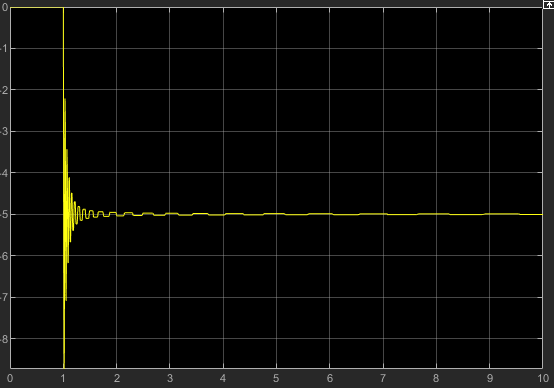
由于系统的刚性更高,因此更高频率的振动需要求解器使用更小的步长。要降低系统的刚度,请添加阻尼。