Chain Drive
Power transmission system with chain and two sprockets

Libraries:
Simscape /
Driveline /
Couplings & Drives
Description
The Chain Drive block represents a power transmission system with a chain and two sprockets. The chain meshes with the sprockets, transmitting rotary motion between the two. Power transmission can occur in reverse, that is, from driven to driver sprocket, due to external loads. This condition is known as back-driving.

The drive chain is compliant. It can stretch under tension or slacken if loose. The compliance model consists of a linear spring-damper set in a parallel arrangement. The spring resists tensile strain in the chain. The damper resists tensile motion between chain elements.
The spring and damper forces act directly on the sprockets that the chain connects. The spring force is present when one chain branch is taut. The damper force is present continuously. To represent and report a failure condition, the simulation stops and generates an error if the net tensile force in the chain exceeds the specified maximum tension value.
The block accounts for viscous friction at the sprocket joint bearings. During motion, viscous friction causes power transmission losses, reducing chain-drive efficiency. These losses compound due to chain damping. To eliminate power transmission losses in the chain drive, in the Dynamic settings, set the parameters for viscous friction and chain damping to zero.
Equations
The tensile strain rate in the chain is the difference between the sprocket tangential velocities, which are each the product of the angular velocity and pitch radii. Mathematically,
where:
x is the tensile strain.
ωA, ωB are the sprocket angular velocities.
RA, RB are the sprocket pitch radii.
The figure shows the relevant variables.

The chain tensile force is the net sum of the spring and damper forces. The spring force is the product of the tensile strain and the spring stiffness constant. This force is zero when the tensile strain is smaller than the chain slack. The damper force is the product of the tensile strain rate and the damping coefficient. Mathematically,
where:
S is the chain slack.
k is the spring stiffness constant.
b is the damper coefficient.
The chain exerts a torque on each sprocket equal to the product of the tensile force and the sprocket pitch radius. The two torques act in opposite directions according to these equations:
Where:
τA is the torque that the chain applies on sprocket A.
τB is the torque that the chain applies on sprocket B.
In terms of velocity and consideration of friction, these equations apply:
Where:
ωA is the rotational velocity for sprocket A.
ωB is the rotational velocity for sprocket B.
μA is the coefficient of viscous friction for sprocket A.
μB is the coefficient of viscous friction for sprocket B.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.
Examples
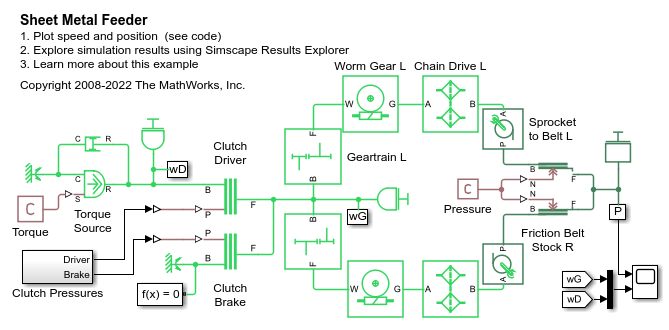
Sheet Metal Feeder
A feeding mechanism of a sheet metal cutter. Two slitted rolls are driven by a torque motor through two mechanical drivetrains. Each drivetrain consists of a spur gear train, worm gear, and a chain drive. The sprocket of the chain drive is connected to its respective slitted roll. The interaction between the rolls and the sheet metal is simulated by the Loaded Contact Translational Friction blocks.
Assumptions and Limitations
The sprocket tooth ratio equals the sprocket pitch radius ratio.
Chain inertia is negligible.