Fundamental Friction Clutch
Friction clutch with kinetic and static-limit friction torques as inputs

Libraries:
Simscape /
Driveline /
Clutches /
Fundamental Components
Description
The Fundamental Friction Clutch block represents a mechanism that transmits rotational power through friction. The clutch contains two friction plate sets, each rigidly connected to a driveshaft, that come into contact to engage. Once in contact, the plates experience frictional torques that enable power to flow between the driveshafts.
The clutch can be bidirectional or unidirectional. A bidirectional clutch can slip in the positive and negative directions. A unidirectional clutch can slip only in the positive direction. The slip direction is positive if the follower shaft spins faster than the base shaft and negative if it spins slower. The block defines the slip velocity as the difference
where:
ω is the slip velocity.
ωF is the angular velocity of the follower driveshaft.
ωB is the angular velocity of the base driveshaft.
Clutch States
The clutch can be in three states:
Locked — Real clutch state in which the friction plates spin as a unit. A locked clutch has one rotational degree of freedom. It experiences no power losses due to friction.
Unlocked — Real clutch state in which the friction plates slip with respect to each other. An unlocked clutch has two rotational degrees of freedom. It experiences power losses equal to the product of the slip velocity and the kinetic friction torque.
Wait — Virtual clutch state that maintains the motion of the previous state while testing for locking and unlocking. The clutch degrees of freedom and power losses depend on the previous clutch state.
The schematic shows the conditions under which the clutch is locked and unlocked. The clutch is generally locked if the torque it transfers lies between its static friction torque limits and the magnitude of the slip velocity is smaller than its velocity tolerance. The clutch unlocked otherwise.

In the schematic:
τ is the torque transferred between the clutch plates.
τS- and τS+ are the static friction torque limits.
τK is the kinetic friction torque between the clutch plates.
ωTol is the slip velocity tolerance of the clutch.
ω is the slip velocity between the clutch plates.
The block identifies the clutch state through physical signal port M using values -1, 0, and +1. The table summarizes the correspondence between the states and the output values.
| State | Value |
|---|---|
| Unlocked Forward or Wait Forward | +1 |
| Unlocked Reverse or Wait Reverse | -1 |
| Locked or Unlocked Initial State | 0 |
State Transitions
At the start of simulation, the clutch is in one of two states — locked or initial unlocked. The initial unlocked state is unique in that it lacks a direction of motion. The clutch remains in this state until the clutch slip velocity becomes nonzero. The clutch then transitions to the appropriate state, unlocked reverse or unlocked forward, according to the schematic.
During simulation, the clutch tests various dynamic conditions to determine the appropriate state transitions, if any. The schematics show the possible transitions, their dynamic conditions, and the resulting states. If the clutch is unidirectional, the schematic reduces to the right half. The diagram shows transitions for a one-way clutch.
![]()
The diagram shows transitions for a two-way clutch.
![]()
Thermal Model
The Fundamental Friction Clutch block simulates the effects of heat flow and heat generated relative to the amount of power dissipated when you enable the thermal port. To simulate heat flow, you must connect the port to another block with an enabled thermal port. Many Simscape™ Driveline™ blocks have thermal modeling options. When a parameter that supports thermal modeling is available, it appears as a vector whose length corresponds to the length of Temperature. For more information, see Model Thermal Losses in Driveline Components.
To enable the thermal port, set Thermal Port to
Model. Enabling the thermal port also enables these settings:
Parameters > Thermal Mass
Variables > Temperature
Variables
Use the Variables settings to set the priority and initial target values for the block variables before simulating. For more information, see Set Priority and Initial Target for Block Variables.
To enable these settings, set Thermal port to
Model.
Examples
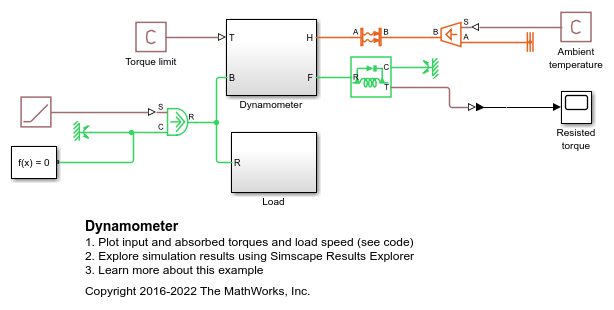
Dynamometer
This examples shows a dynamometer resisting a load from a prime mover. This prime mover is modeled as a torque source and could be an internal combustion engine, electric drive, or a hydraulic motor. The dyno absorbs input torque up to its limit, and allows rotation of connected loads for torques beyond. The dyno itself is modeled using the Fundamental Friction Clutch with static and dynamic limits set to the torque limit.
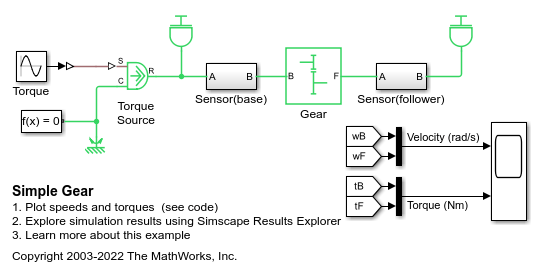
Simple Gear
A simple gear coupling two inertias (shafts). The gear ratio between the follower (F) and base (B) is 2:1. Thus the angular velocity of the follower shaft is half the angular velocity of the base shaft. The follower shaft torque is twice the base shaft torque.

Custom Clutch
Two inertias coupled by a simple gear controlled by a clutch. Initially, the clutch pressure is zero, and the inertias have zero velocity. A constant torque is applied to Inertia 1. Once the clutch pressure starts increasing from zero at 2 seconds, Inertia 2 starts spinning, then locks with Inertia 1. From 6 to 7 seconds, the clutch pressure is ramped down to zero, and Inertia 2 starts to spin freely once the clutch unlocks. Because there is no frictional loss, it keeps spinning.
Ports
Input
Output
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2011a