Motor & Drive
Generic motor and drive with closed-loop torque control

Libraries:
Simscape /
Driveline /
Engines & Motors
Description
The Motor & Drive block represents a generic brushless motor and drive with closed-loop torque control. It is a simplified version of the Motor & Drive (System Level) (Simscape Electrical) block. The Motor & Drive block is useful if you need a generic or low-fidelity motor implementation in your system. It is also suited for cases when you do not know all of your motor specifications or you want to use the block to find an appropriate motor for your system.
To enable faster simulation, the block abstracts the motor, drive electronics, and control. The block generates a torque-speed envelope that saturates the input torque, and it permits only the range of torques and speeds that the envelope defines.
Modeling Electrical Losses
The Motor & Drive block models first-order losses based on the overall efficiency for a given speed and torque, which you specify as Motor and driver overall efficiency (percent), Speed at which efficiency is measured, and Torque at which efficiency is measured, respectively. The block uses the speed and torque to generate a torque-speed envelope. The envelope saturates the input torque, which yields the torque that the motor responds to, τelec. This is also the torque that the block uses to compute the electrical losses.
The block only considers torque-dependent resistive losses such that
where
Resistive losses are also known as Ohmic losses and occur due to the tendency of the armature windings to resist the flow of electrons. The electrical power includes these losses such that
The rate of conversion from electrical energy to heat energy is defined by Joule's law:
where:
Pelec is the electrical power that the block calculates and uses in the governing equation.
Plosses is the electrical power lost during operation. When you model the effects of heat flow and temperature change, this value represents the rate of heat flow that gets distributed into the thermal mass or out port H.
ω is the angular velocity of the rotor. This is equivalent to the W output port value.
τelec is the saturated torque demand.
k is the proportionality constant for resistance losses, which has the units (energy*time)-1.
η is the efficiency of the motor and driver for a given speed and torque. This value is equivalent to the Motor and driver overall efficiency (percent) parameter.
ωη is the angular velocity that corresponds to the overall efficiency. This value is equivalent to the Speed at which efficiency is measured parameter.
τη is the torque that corresponds to the overall efficiency. This value is equivalent to the Torque at which efficiency is measured parameter.
V is the voltage across the terminals.
I is the current through the terminals.
When you enable thermal modeling, Plosses represents the contribution from the block to the heat flow.
To include series resistance, fixed losses, and iron losses, you can add blocks to your model or use the Motor & Drive (System Level) (Simscape Electrical) block.
Tip
You can add damping and inertia with the Rotational Damper block and Inertia block, respectively.
Thermal Modeling
You can model the effects of heat flow and temperature change by enabling the optional
thermal port. To enable the port, set Thermal port to
Model.
When you model the effects of heat flow and temperature change, the electrical losses from the motor contribute to these effects.
Variables
Use the Variables tab to set the priority and initial target values for the block variables before simulating. For more information, see Set Priority and Initial Target for Block Variables.
To enable this setting, set Thermal port to
Model.
Assumptions and Limitations
The motor driver tracks a torque demand with the time constant Tc.
Motor speed fluctuations due to mechanical load do not affect the motor torque tracking.
Examples
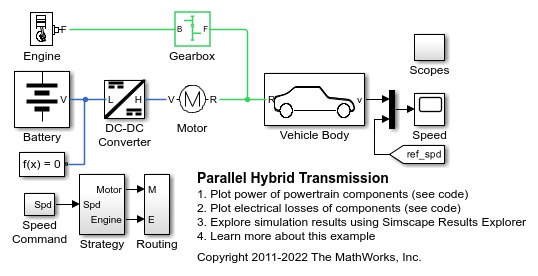
Parallel Hybrid Transmission
The basic architecture of a parallel hybrid transmission. Electrical power is applied in parallel with the combustion engine power. The electrical torque is applied at the wheel axle, but it could also be applied to the engine flywheel. In this test, the vehicle accelerates, maintains the faster speed, and then decelerates back to the original speed. The power management strategy uses just electrical power to effect the maneuver, the combustion engine only delivering the power required to maintain the original speed.
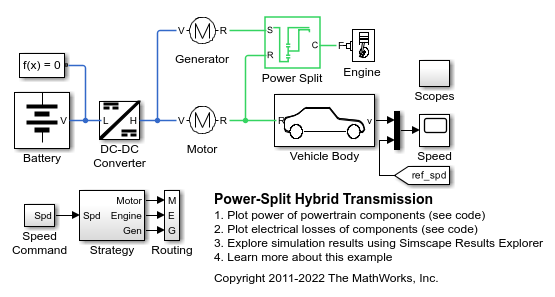
Power-Split Hybrid Transmission
The basic architecture of a power-split hybrid transmission. The planetary gear, along with the motor and generator, acts like a variable ratio gear. In this test, the vehicle accelerates, maintains the faster speed, and then decelerates back to the original speed. The power management strategy uses just stored electrical power to effect the maneuver, the combustion engine only delivering the power required to maintain the original speed.

Series Hybrid Transmission
The basic architecture of a series hybrid transmission. All mechanical power from the engine is converted to electrical power via the generator. In this test, the vehicle accelerates, maintains the faster speed, and then decelerates back to the original speed. The power management strategy uses just stored electrical power to effect the maneuver, the combustion engine only delivering the power required to maintain the original speed.

Two Mode Hybrid Transmission
The basic architecture of a two mode hybrid transmission. It consists of three planetary gear sets and four clutches. This combination permits four fixed gear ratios plus two power-split modes. The power split modes are used to transition between fixed gear ratios and for heavy acceleration/deceleration. The fixed ratios help with efficiency when cruising. For the first power split (input-split regime), only Clutch 1 is engaged. For the second power split (compound-split regime), only Clutch 2 is engaged. Engaging two clutches simultaneously removes one degree of freedom and hence results in a fixed ratio.
Ports
Input
Output
Conserving
Parameters
Version History
Introduced in R2021a
See Also
Motor & Drive (System Level) (Simscape Electrical)