Translational Power Sensor
Average or instantaneous translational power sensor
Libraries:
Simscape /
Driveline /
Sensors
Description
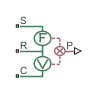
The Translational Power Sensor block represents a sensor that measures the translational power change due to one or more driveline components connected between ports R and C. The power output can be an instantaneous or average value. Two averaging options are available: period and vibration averaging.
The instantaneous power is the product of the current velocity and force. Use the instantaneous power to analyze peak power transmission and identify heavily loaded components.
The time-averaged power is the integral of the instantaneous power over one sample period, divided by that period. For simulation times smaller than the sample period, the average power is zero. The power is constant for each sample period.
The vibration-averaged power is the integral of the power over one vibration period, divided by that period. The vibration period is the time between two consecutive crossings from negative to positive velocity values. Use this averaging method only for oscillations with velocity passing through zero. If the vibration has a variable frequency, the averaging period can change. For simulation times smaller than the vibration period, the average power is zero. The power output is constant for each vibration period.
Examples
This example shows the use of a Translational Power Sensor block. An oscillating velocity source moves a Mass block. The motion of the mass is damped by and Air Spring block. The Translational Power Sensor block outputs the power due to the motion of the mass to a Scope block. The Translational Power Sensor block measures force in line and velocity in parallel.
Because the motion of the mass is damped by the air spring, there is a positive average power over a given time. You can confirm this by changing the Measurement type parameter to either Average power over a specified period or Average power over a vibration.
![]()
Ports
Input
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2013a