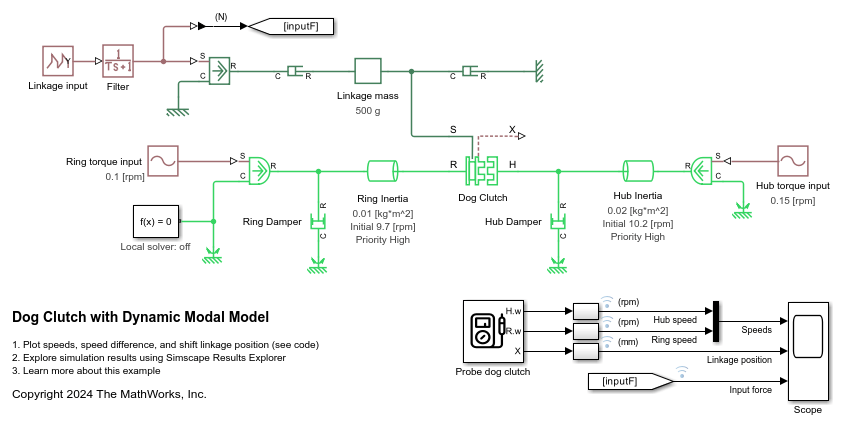
Dog Clutch with Dynamic Modal Model
This example shows the engage and disengage behavior of a dog clutch using the dynamic modal model for torque transmission. The block parameterization uses mode charts to control the clutch engagement. The clutch fails to engage when the speed difference between the ring and hub is too great.
Model
The clutch is connected with inertias and dampers on the ring (R) and hub (H) and receives torque from both sides while the shift linkage (S) moves to engage or disengage the clutch. With the dynamic modal torque transmission model, the dog clutch can engage only when the speed difference between the ring and hub is smaller than the Engagement speed threshold parameter value of 9 rpm.
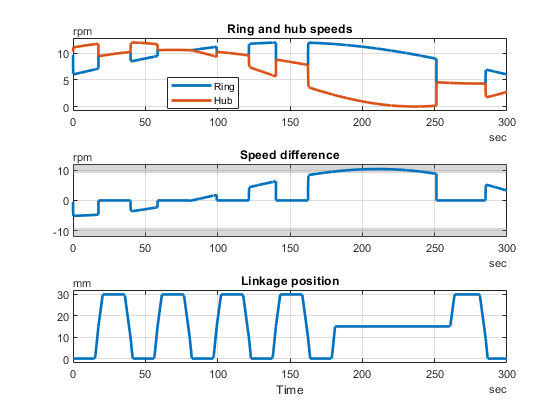
Simulation Results
The plots show that the clutch does not engage around 180 seconds, because the speed difference is greater than the threshold which is indicated in the middle plot for speed difference in gray below -9 rpm and above 9 rpm. Observe that the linkage is not fully engaging.