带模拟位置控制器的液压作动器
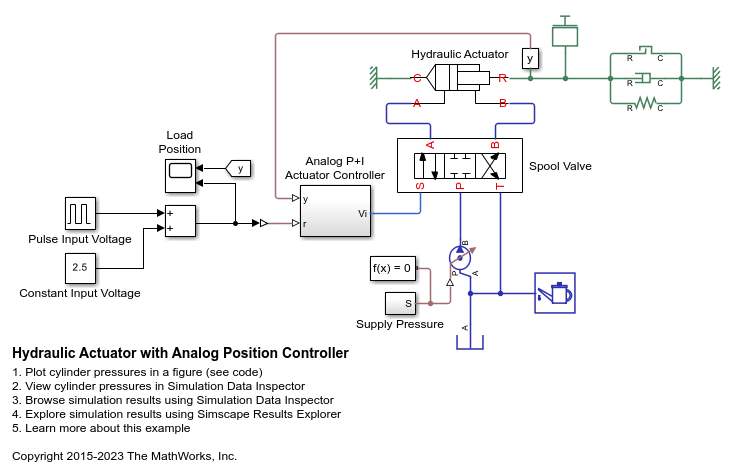
此示例展示了如何使用 Foundation 库对跨电气、机械和等温液体域的系统进行建模。在该模型中,在等温液体域中实现的液压系统控制机械负载位置以响应电压参考需求。如果参考需求为零,则液压作动器(和负载)位移为零,如果参考为 +5 伏特,则位移为 100 毫米。
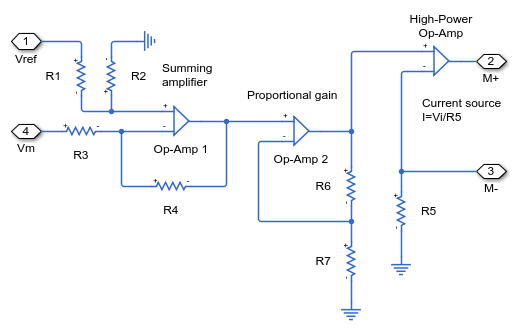
比例加积分控制器是使用运算放大器实现的,其最后一级设置为电流源。然后,这通过建模的电阻和电感项来驱动扭矩电机。扭矩电机直接驱动滑阀,滑阀进而控制为液压油缸提供动力的主液压回路。最后,液压油缸驱动通用机械负载。
具有这种保真度级别的模型非常适合支持伺服阀控制器的设计和测试。它包括影响稳定裕度的机电高频模式,以及当液压系统提出大量要求时的非线性流量效应。
模型
作动器控制电路子系统

滑阀子系统

电机控制电路子系统
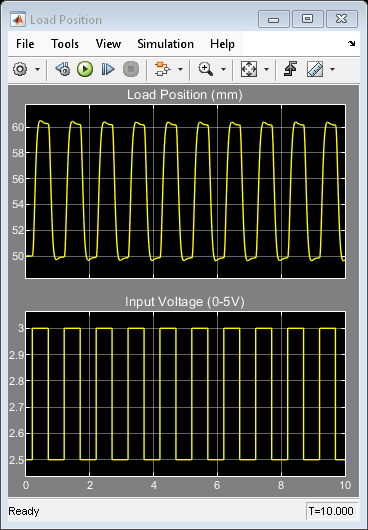
来自示波器的仿真结果
来自 Simscape 记录的仿真结果
下图显示了在 MATLAB 图窗中绘制的气缸压力和负载位置。您还可以在 Simscape 结果浏览器和仿真数据检查器中查看数据。
