联动机构
此示例展示了 Simscape™ Lever 模块在连杆机构中的使用。杠杆 1 和杠杆 4 是支点在末端的一级杠杆。杠杆 3 是支点在中间的二级杠杆。杠杆 2 是由杠杆 1 和杠杆 3 驱动的叠加杠杆。
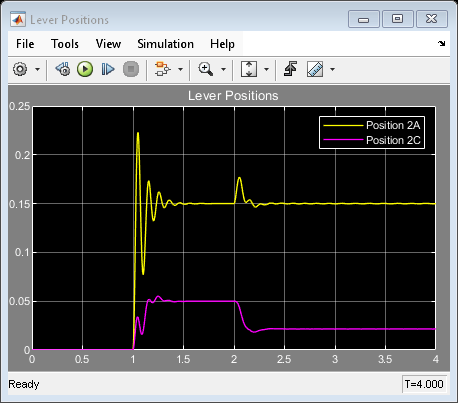
该机构由两个力源激励。一个力源在第 1 秒突然对杠杆 1 施力,然后另一个力源在第 2 秒突然对杠杆 3 施力。
模型

来自示波器的仿真结果
此示例展示了 Simscape™ Lever 模块在连杆机构中的使用。杠杆 1 和杠杆 4 是支点在末端的一级杠杆。杠杆 3 是支点在中间的二级杠杆。杠杆 2 是由杠杆 1 和杠杆 3 驱动的叠加杠杆。
该机构由两个力源激励。一个力源在第 1 秒突然对杠杆 1 施力,然后另一个力源在第 2 秒突然对杠杆 3 施力。