Simulink 和 Simscape 中的质量-弹簧-阻尼器系统
此示例将使用 Simscape™ 模块和物理连接的质量-弹簧-阻尼器系统模型与使用 Simulink® 模块和信号的模型进行比较。
Simulink 模型使用信号连接,定义了模块之间的数据流。Simscape 模型使用物理连接,允许能量在组件之间双向传递。通过物理连接,您可以通过复制和粘贴组件向质量-弹簧-阻尼器系统添加多个阶段。使用输入/输出连接则需要重新推导和重新实现方程。
弹簧的初始扰度为 1 米,显示在 Spring 模块和其中一个 Integrator 模块的模块注解中。
模型

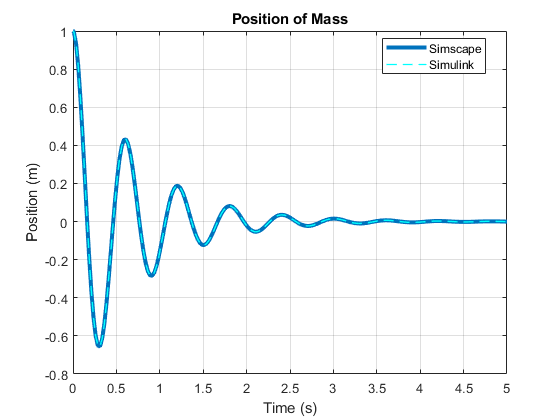
来自 Simscape 记录的仿真结果