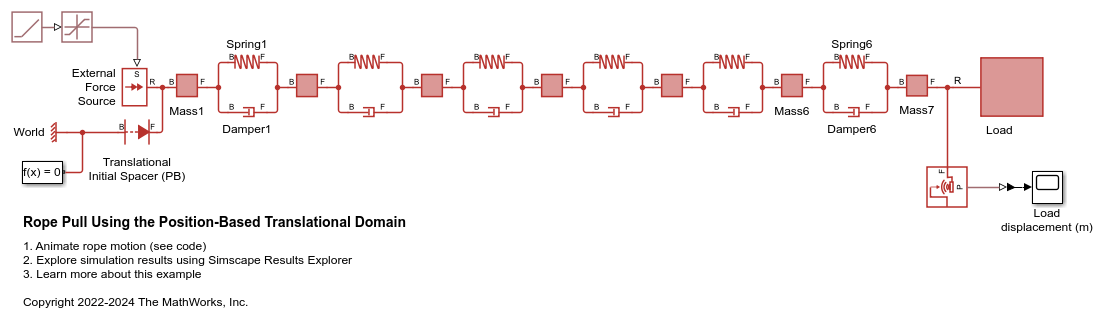
Rope Pull In the Position-Based Translational Domain
This example shows a force pulling on the end of a cable or rope that has a large load on its other end. The rope is modeled with distributed mass and elasticity using Mass With Length (PB), Translational Spring (PB), and Translational Damper (PB) blocks. When the force increases from 0 N to 1,000 N, it excites longitudinal vibrations in the rope.
This example uses the mechanical position-based translational domain where the Through variable is force and the Across variables are velocity, v, and position, x. The domain file contains an equations section that relates the Across variables because the domain has more Across variables than Through variables. The equation in the equations section establishes the differential relationship, der(x) = v. The domain equation propagates to all nodes of the domain. This example shows how the position variable facilitates the specification and tracking of relative positions between model elements. The plotting script of this example shows how the logged node positions can be readily plotted in an animation to visualize the rope response.
Model
Simulation Results from Simscape Logging