电磁铁
此示例展示了一个带有弹簧复位的电磁铁。该电磁铁被建模为一个电感,其值 L 取决于柱塞位置 x。时变电感的反电动势为:

由于 L 取决于 x,公式变为:

 可以使用关系式根据制造商力-行程数据得出:
可以使用关系式根据制造商力-行程数据得出:

然后,可以求 的积分来得到 L 关于 x 的函数。
在该模型中,方程 2 会重新排列来求解 i,然后使用物理信号模块来实现。然后,通过一个受控电流源将电流约束为等于 i。
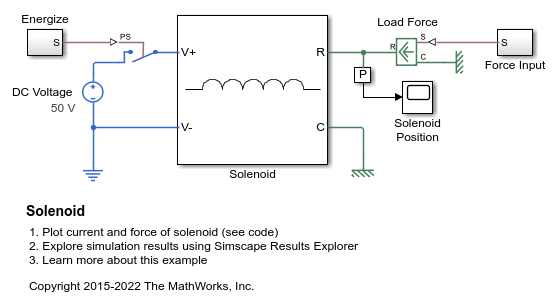
模型
Solenoid 子系统

来自 Simscape 记录的仿真结果

此示例展示了一个带有弹簧复位的电磁铁。该电磁铁被建模为一个电感,其值 L 取决于柱塞位置 x。时变电感的反电动势为:
由于 L 取决于 x,公式变为:
可以使用关系式根据制造商力-行程数据得出:
然后,可以求 的积分来得到 L 关于 x 的函数。
在该模型中,方程 2 会重新排列来求解 i,然后使用物理信号模块来实现。然后,通过一个受控电流源将电流约束为等于 i。