Drive with PID Control
This example shows how to simulate a simple closed-loop control algorithm in Simulink® and how to run it on LEGO® MINDSTORMS® EV3 hardware.
Introduction
In a vehicle using independent wheel control, applying the same power to each wheel generally does not result in the vehicle moving straight. This is caused by mechanical and surface differences experienced by each of the wheels. To reduce deviation in the vehicle heading, a better approach is to use a closed-loop controller which adjusts the power applied to two motors based on difference in their rotations. One such controller is a well-known proportional-integral-derivative (PID) controller.
Proportional-integral-derivative control is a basic control loop feedback mechanism. The controller minimizes the difference between the measured and the desired value of a chosen system variable by adjusting the system control inputs.
This example shows you how to simulate the controller using a simple plant model, first with no feedback control (Open-Loop Control), and then with feedback control (Closed-Loop Control). This example also illustrates how to switch between simulating the PID controller and running it on hardware in the same model.
Prerequisites
We recommend completing the Getting Started with LEGO MINDSTORMS EV3 Hardware and Communicating with LEGO MINDSTORMS EV3 Hardware examples.
Required Hardware
LEGO MINDSTORMS EV3 Brick
Two LEGO MINDSTORMS EV3 Large Motors
EV3 Wi-Fi® Dongle or USB Ethernet Adaptor (optional for Steps 3 and 5)
Task 1 - Build the LEGO MINDSTORMS EV3 Vehicle and Set Up the Network Connection
1. Build a vehicle using two motors to control two independent wheels. For example, you can build a vehicle similar to the one described in the printed building instructions in the education core set.
2. Set up the connection between EV3 brick and your host machine. Refer to Task 1 and 2 in Getting Started with LEGO MINDSTORMS EV3 Hardware example.
Task 2 - Simulate Open-Loop Control Model
This step illustrates that independently powered wheels cause deviations in vehicle heading.
1. Open the ev3_drive_openloop> Simulink model and observe two different subsystems in the model.
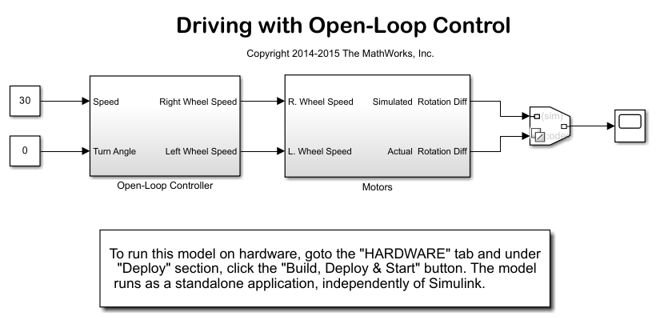
2. Open the Open-Loop Controller subsystem. This subsystem controls the vehicle driving. Observe that the controller does not use the difference between two encoder outputs to control the motors.
3. Notice the Motors subsystem. The subsystem contains both simulated and actual motors. The Environment Controller block takes the outputs of the simulated or actual motors, depending on the current environment. This allows you to represent both simulated and actual motors in one model. As an alternative, you may create two models, one for simulation, and the other one for running on actual hardware.
4. Click Run button in the Simulink toolbar. Click the Scope block and observe that the Encoder Output Mismatch increases over time. This indicates that the vehicle will not move straight.
Task 3 - Run Open-Loop Control Model on LEGO MINDSTORMS EV3 Hardware
1. Configure the model as described in Task 5 of the Getting Started with LEGO MINDSTORMS EV3 Hardware example.
2. In the Hardware tab of your Simulink model, click Build, Deploy & Start. The model runs on LEGO MINDSTORMS NXT hardware and the vehicle starts moving.
3. Notice that the path of the vehicle is not straight, as predicted by the simulation.
Task 4 - Simulate Closed-Loop Control Model
1. Open the ev3_drive_closedloop> Simulink model and observe two subsystems in the model.
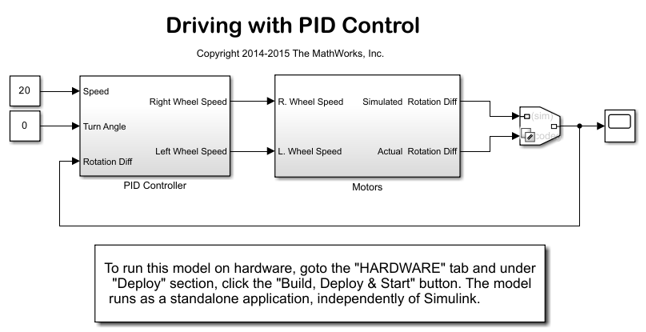
2. Double-click PID Controller subsystem. Notice that the P control is used to synchronize two motors when the vehicle runs straight. Also, notice that during a turn, no synchronization is applied.
3. Click Run button in the Simulink toolbar. Click the Scope block and observe that the Encoder Output Mismatch remains close to zero. This indicates that the vehicle will skew less compared to the Open Loop Control model.
Task 5 - Run Closed-Loop Control Model on LEGO MINDSTORMS EV3 Hardware
1. Configure the model as described in Task 5 of the Getting Started with LEGO MINDSTORMS EV3 Hardware example.
2. In the Hardware tab of your Simulink model, click Build, Deploy & Start. The model runs on the LEGO MINDSTORMS EV3 hardware and the vehicle starts moving.
3. Observe that the path of the vehicle is straighter, as predicted by the simulation.
Other Things to Try
Adjust the PID Controller settings. Improve the vehicle's ability to move straight on a rough or tilted surface.
Use Simulink Monitor & Tune feature to tune parameters and monitor signals.