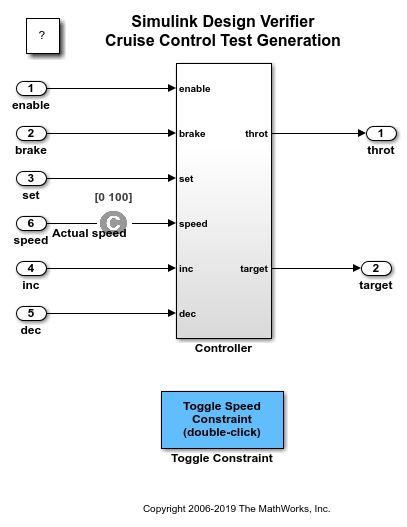
巡航控制测试生成
此示例说明如何生成实现完整模型覆盖率的测试用例。默认情况下,Simulink® Design Verifier™ 会生成以最少步数满足目标的测试用例。其中一个测试目标强制使 PI 控制器中的离散积分器超出其上限。当您在不设有约束的情况下运行 Simulink Design Verifier 时,通过将速度强制设为 500,只需一步就会超出上限。对速度的约束会将测试用例中的速度值限制在 0 到 100 之间。这使得测试用例必须进行多次采样才能使积分器超出其上限。
open_system('sldvdemo_cruise_control');