Point Cloud
Point cloud geometry

Libraries:
Simscape /
Multibody /
Curves and Surfaces
Description
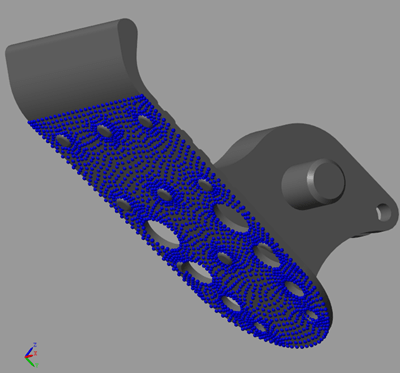
The Point Cloud block creates a set of points in space. Each point has a rigid offset with respect to the reference frame of the Point Cloud block. You can use a Point Cloud block to approximate a geometry, such as a body with concave shape, for contacts. When modeling certain sustained and distributed contact problems, the Spatial Contact Force block might perform better with a Point Cloud block than with a geometry block, such as Brick Solid or File Solid. This image demonstrates how to use a point cloud to approximate the bottom of a robot foot.
When modeling contacts for a point cloud, the Spatial Contact Force and Planar Contact Force blocks treat a point cloud as an aggregation of N-point geometries and applies contact forces to each point independently. Each contact force is based on the penetration and velocity of the individual point of the cloud.
You can create a 2-D or 3-D point cloud by using an N-by-2 or N-by-3 matrix. Each row of the matrix specifies the Cartesian coordinates of a point with respect to the reference frame of the Point Cloud block. An error occurs if the matrix has any repeated rows.
Tip
You can use the unique function to remove repeated
rows from an input matrix.
Examples
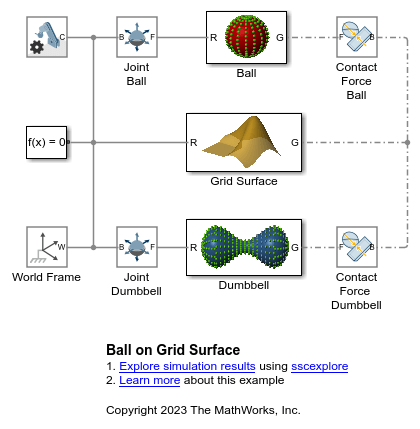
Contact Modeling - Ball on Grid Surface
A ball and dumbbell rolling down on an L-shaped surface. Grid Surface block is used to generate the L-shaped membrane. Point Cloud blocks are used to model the contact between the ball/dumbbell and the surface. The number of point blocks can be controlled by varying the point cloud density. This example demonstrates the capabilities of Grid Surface and Point Cloud blocks to model contacts between complex shaped bodies.
Ports
Frame
Geometry
Parameters
Extended Capabilities
Version History
Introduced in R2021a