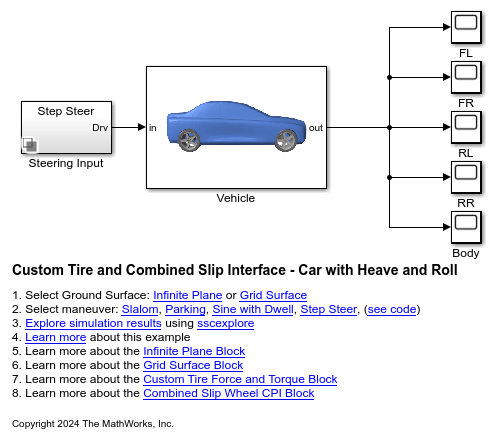
Custom Tire and Combined Slip Interface - Car with Heave and Roll
This example demonstrates how to interface Custom Tire Force and Torque block in Simscape™ Multibody™ with the Combined Slip Wheel CPI block in Vehicle Dynamics Blockset™ to model contact between a plane or a grid surface and the tires of a vehicle. Use the Infinite Plane block or Grid Surface block to model the surface on which the vehicle is maneuvering. To configure the driver inputs, use one of the maneuvers.
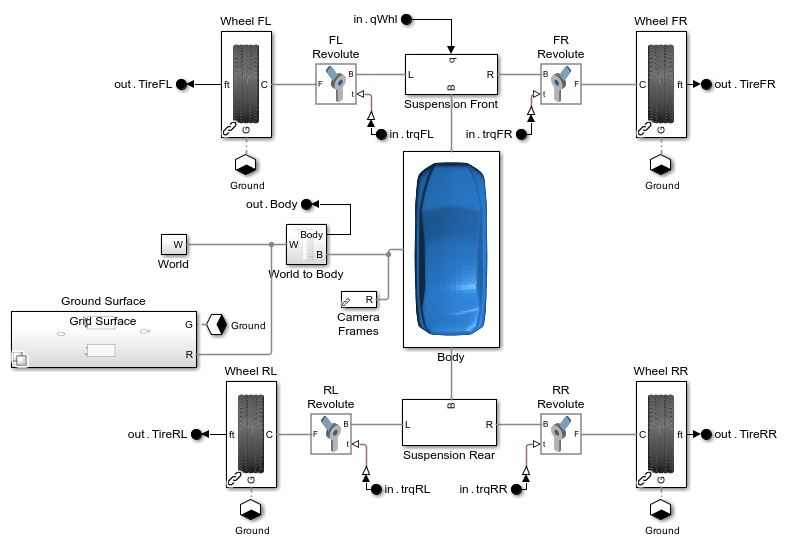
The vehicle model includes a six degree-of-freedom body model, two axles each with heave and roll degrees of freedom, and four wheels that rotate. The front wheels are steered using the Ackermann steering equation [1].
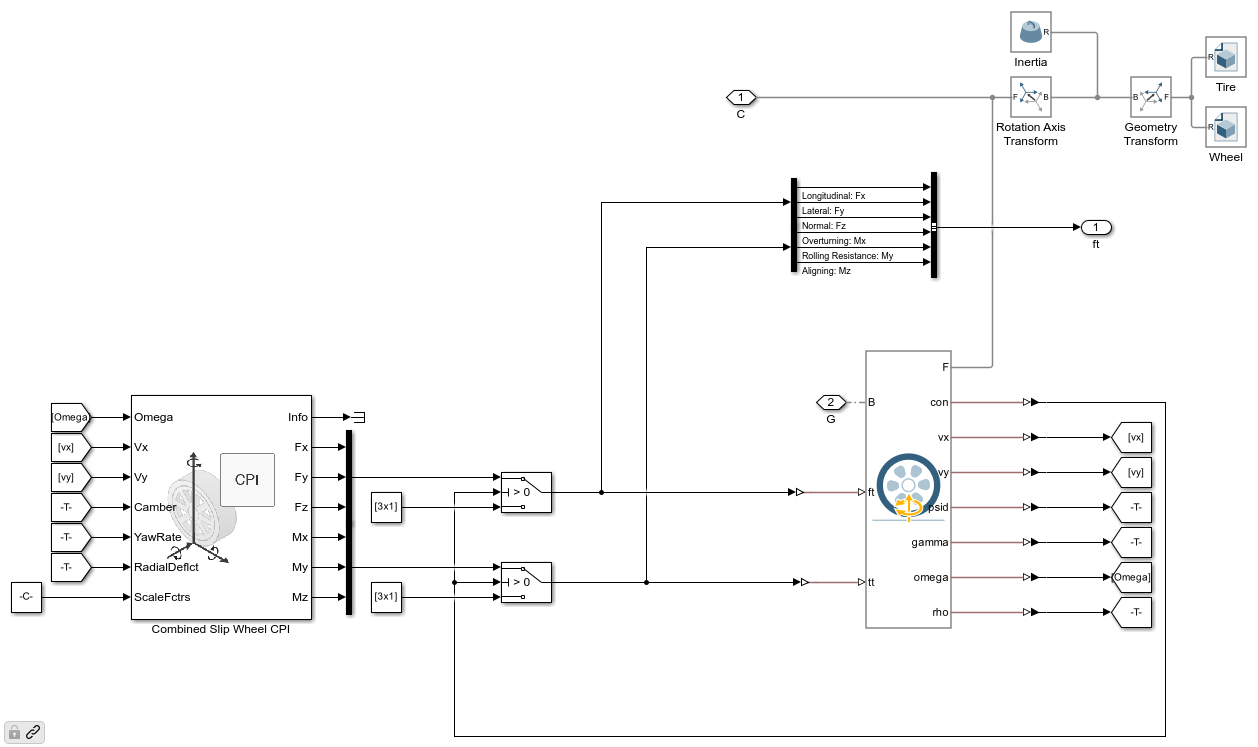
The example models the tire as a closed loop by using the Custom Tire Force and Torque block and Combined Slip Wheel CPI block. The Custom Tire Force and Torque block computes the interactions and spatial relationships between the tires and the ground surface and sends the output to the Combined Slip Wheel CPI block. The Combined Slip Wheel CPI block computes the tire force and torque values relative to the contact frame of the tire which are looped back as an input to the Custom Tire Force and Torque block.
For more customizable models of battery-electric vehicles, hybrid-electric, and multi-axle vehicles, see the https://www.mathworks.com/matlabcentral/fileexchange/79484-simscape-vehicle-templates Simscape Vehicle Templates.
Acknowledgments: MathWorks would like to thank M V Krishna Teja, PhD, Virtual Proving Ground and Simulation Lab, Raghupati Singhania Centre of Excellence at the Indian Institute of Technology, Madras for contributions to this example, including the tire parameters.
References:
[1] Jazar, R. N. (2008). Vehicle dynamics (Vol. 1). Berlin/Heidelberg, Germany: Springer.