Forklift
This example models a forklift which uses the hydraulic and pulley mechanisms to perform the lift action. The tilting of masts is also controlled by hydraulic cylinders. The forklift comprises of 3 masts, namely main mast, top mast and fork mast. The main mast is connected to the chassis by revolute joints and its tilting is governed by the hydraulic tilt cylinders. The top mast slides over the main mast and its motion is governed by the hydraulic lift cylinders. The fork mast slides on the top mast and hangs through belt-cable circuits which drives the movement of the fork mast. A common warehouse application is shown in this example where the objective of the forklift is to grab a box, pass over a bump and place the box in the racks. Spatial Contact Force blocks are used at all contact locations to model the contact between the bodies. The contact between the ground surface and the wheels are modeled using infinite plane block and the contact between the forks and the box are modeled using the point blocks.
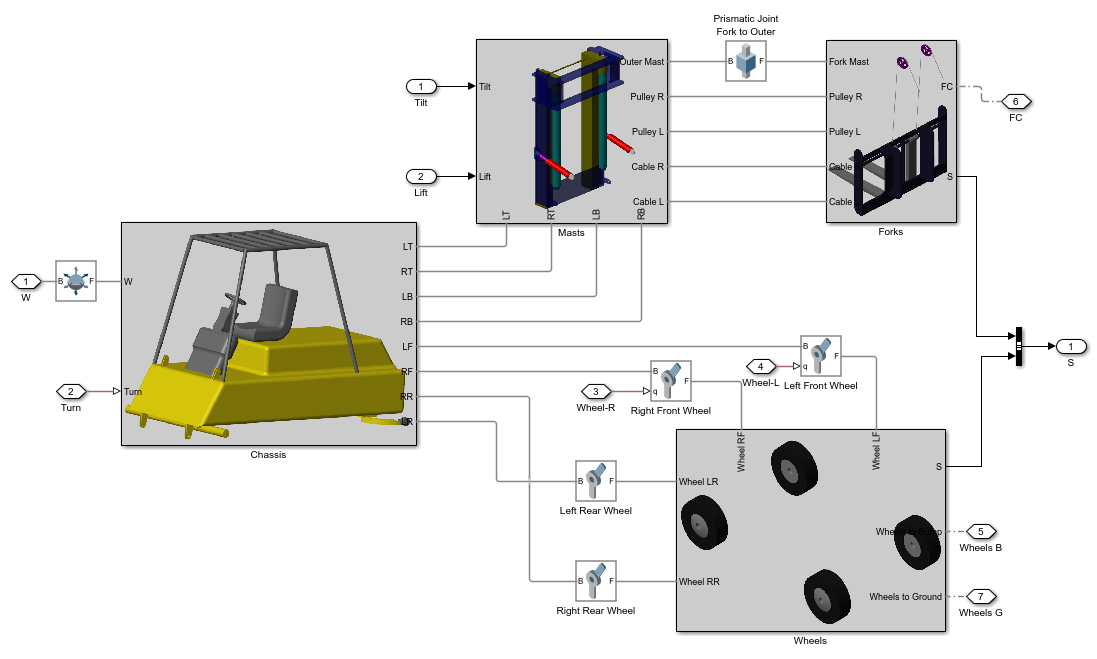
Model

Assembly of Forklift
Simulation Results from Simscape Logging
The plot below shows the Normal force and Frictional force at each wheels during the lift, bump and place motion of the forklift.
