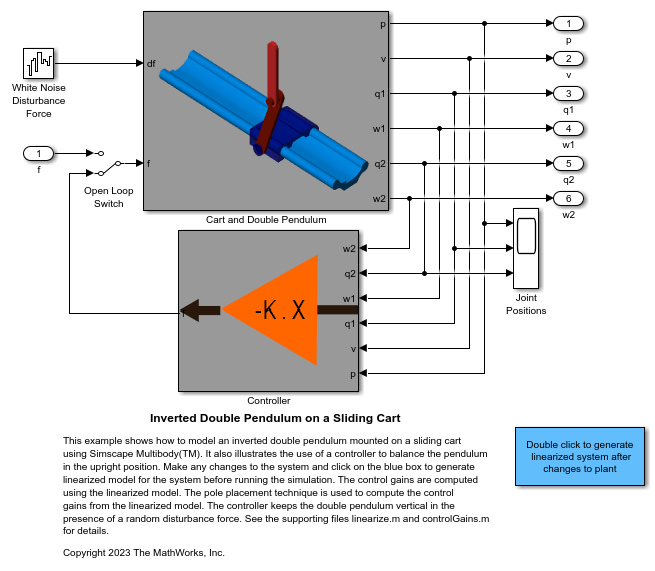
Inverted Double Pendulum on a Sliding Cart
This example shows how to model an inverted double pendulum mounted on a sliding cart using Simscape™ Multibody™. It also illustrates the use of a controller to balance the pendulum in the upright position. Make any changes to the system and click on the blue box to generate a linearized model for the system before running the simulation. The control gains are computed using the linearized model. The pole placement technique is used to compute the control gains from the linearized model. The controller keeps the double pendulum vertical in the presence of a random disturbance force. See the supporting files linearize.m and controlGains.m for details.