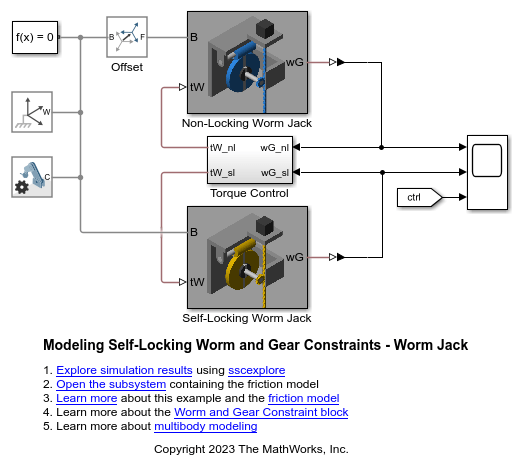
Modeling Self-Locking Worm and Gear Constraints - Worm Jack
This example models a self-locking worm and gear constraint. The model shows a mechanical jack driven by a torque applied to a worm. The model includes two worm jack subsystems identical in every sense except for the value of the worm lead angle. Both subsystems have friction models applied to their Worm and Gear Constraint blocks.
A worm and gear constraint is self-locking when the static friction coefficient is greater than the tangent of the worm lead angle. One subsystem has a worm lead angle slightly less than this threshold (self-locking) and the other subsystem has a worm lead angle slightly greater than this threshold (non-locking).
The torque applied to the worm lifts a load via a rack and pinion. When the load reaches its highest point the torque signal is disabled. This effectively models a motor malfunction. The non-locking subsystem back-drives and the load falls under gravity. The self-locking subsystem remains at the highest point.