Ratchet Pawl Mechanism
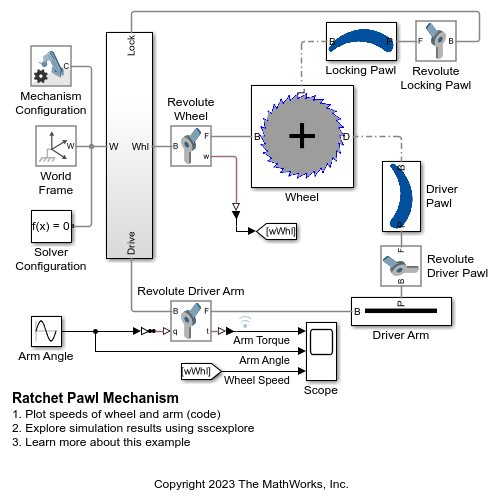
This example models a ratchet with a locking pawl. The arm pushes the driving pawl to rotate the ratchet wheel. The locking pawl holds the ratchet wheel in place while the arm reverses direction. Planar contact modeling geometry is used to streamline computation.
Model
Wheel Extrusion Data
This plot shows the extrusion data for the wheel. This was created in MATLAB and was used to generate the data for the contact geometry along the edges of the wheel.

Pawl Extrusion Data
This plot shows the extrusion data for the pawl. This was created in MATLAB and was used to generate the location for the frame where the contact geometry is placed at the tip of the pawl.

Wheel
The wheel subsystem models the mass and inertia of the wheel, contact geometry for the edges of the wheel, and contact forces between the wheel and pawls. Simscape Bus blocks are used to group the geometry connections for each of the line segments representing the teeth edges.

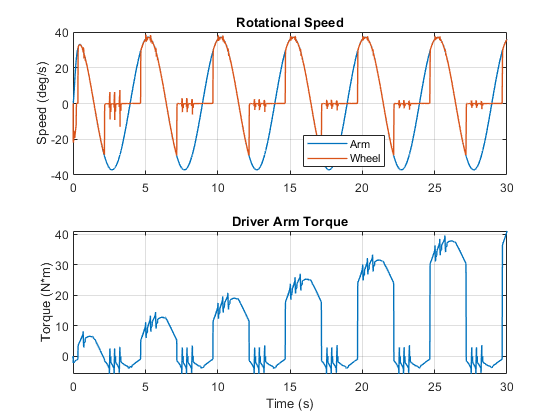
Simulation Results from Simscape Logging
The rotational speeds of the wheel and driver arm are plotted below. The arm and wheel rotate at nearly the same speed as the driver arm rotates counterclockwise. The wheel stays nearly still as the drive arm rotates clockwise. The spikes in the wheel speed are due to the contact forces between the pawls and the wheel.